
Inleiding tot ingebedde systemen
Het systeem waarin het specifieke doel van software is ingebed in een hardware-ontwerp, staat bekend als embedded systeem. Dit systeem kan een onafhankelijk systeem zijn of een groter systeem. De software wordt meestal ingebed in geheugenmodules als ROM, en het heeft geen secundair geheugen nodig zoals in een computer. Telecom, smartcards, raketten, computernetwerken, digitale consumentenelektronica en satellieten zijn enkele van de embedded systeemtoepassingen.

Embedded Systems-toepassingen
Embedded systeemtoepassingen omvatten robotica, digitale camera, multi-tasking speelgoed, kook- en wassystemen, biomedische systemen, toetsenbordcontrollers, mobiele telefoons en smartphones, computersystemen, elektronisch slim gewichtsweergavesysteem en entertainmentsystemen, zoals video's, games, muzieksysteem en videogames, enzovoort.
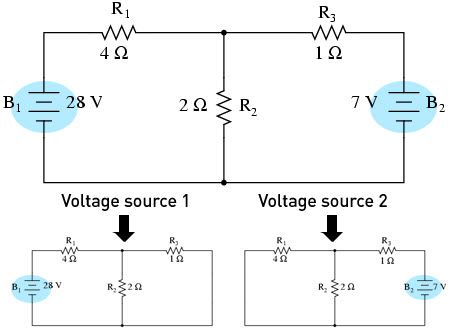
Embedded systeemontwerpproces kan eerst worden gedaan door simulatie, die wordt gebruikt voor het testen van het circuit, omdat het wijzigen van hardware erg moeilijk wordt als het circuit niet goed werkt. Als de resultaten overeenkomen met de gewenste, zal het proces permanent worden ontworpen door opeenvolgende waferprocessen.
Basisprincipes van embedded systemen
Ingebouwde systemen zijn ontworpen om specifieke taken uit te voeren, maar kunnen niet worden gebruikt als computers voor algemene doeleinden om verschillende taken uit te voeren. De software voor embedded systemen wordt normaal gesproken firmware genoemd, die kan worden opgeslagen op een schijf of op een enkele chip. De twee belangrijkste elementen van de systemen zijn:
- Ingebouwde systeemhardware
- Embedded systeemsoftware

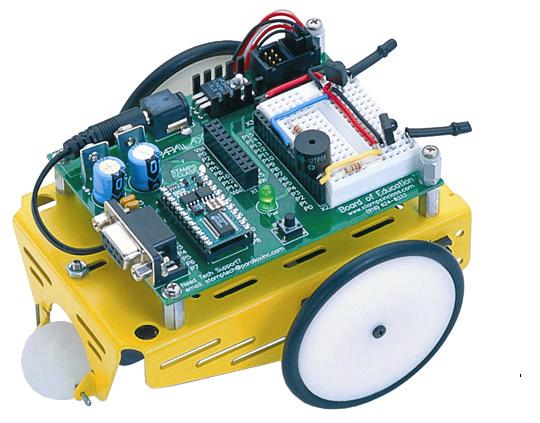
Ingebouwde systeemhardware en software
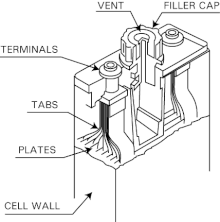
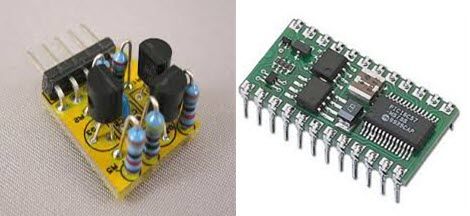
Ingebouwde systeemhardware : Een ingebed systeem vereist een hardwareplatform om te communiceren met verschillende real-time invoer en uitvoer of variabelen. De hardware omvat controller zoals microcontroller of microprocessor , geheugenmodules, I / O-interfaces, displaysystemen en communicatiemodules, enz.
Embedded systeemsoftware : Met deze software kan op een gewenste manier worden geprogrammeerd, zodat verschillende bewerkingen worden bestuurd. Het is geschreven in een indeling op hoog niveau, gecompileerd in code en vervolgens gedumpt in hardwarecontrollers.
Real-time embedded systemen zijn computersystemen die de acties uitvoeren, zoals het monitoren, reageren en controleren van externe bewegingen. De externe omgeving is via. Verbonden met het computersysteem sensoren , actuatoren en I / O-interfaces. Een echt computersysteem ingebed in een computersysteem staat bekend als real-time embedded systeem. Een real-time embedded systeem wordt gebruikt op verschillende gebieden, zoals leger, overheidssectoren en in de medische wereld.
Robotic Real Time Projects in Embedded Systems
Embedded systemen kan worden gebruikt in veel van de real-time toepassingen zoals auto's, robotica, industrieën, enz. Het volgende real-time projecten zijn gerelateerd aan robottechnologie
1. Spraakgestuurd robotvoertuig met spraakherkenning over lange afstand
Het doel van dit project is om een robotvoertuig te besturen met spraakopdrachten voor bediening op afstand. Een 8051 microcontroller wordt gebruikt met een spraakherkenningsmodule om de gewenste bewerking uit te voeren. Het maakt gebruik van een 8051-microcontroller, een spraakherkenningsmodule, een drukknop, een RF-module, een encoder, een decoder, een motor-driver-IC, DC-motoren, batterijen en andere diverse componenten.

Spraakgestuurde robotvoertuigzender
Voertuigbewegingen zoals links, rechts, omhoog en omlaag kunnen worden uitgevoerd met behulp van drukknoppen of spraakopdrachten via een spraakherkenningsmodule die is gekoppeld aan de microcontroller. Hier wordt een encoder gebruikt om de opdrachten die aan de microcontroller worden gegeven te coderen met behulp van de RF-zender om de signalen uit te zenden met een frequentie van 433 MHz.
Daarom, wanneer signalen die tevoorschijn komen door op knoppen te drukken, of de spraakcommandosignalen die overeenkomen met de beweging, worden ontvangen door de microcontroller, stuurt deze besturingssignalen naar het ontvangercircuit via de zendermodule.

Spraakgestuurde robotvoertuig-ontvanger
Na ontvangst van deze signalen, draagt een RF-ontvanger die signalen over naar een decodercircuit waarin de binaire gegevens worden omgezet in een signaal op microniveau. Daarom voert de micrcontroller de gewenste beweging uit vanaf het zendcircuit. Lasermodule is gekoppeld aan de microcontroller voor het detecteren van de operaties die door de robot worden uitgevoerd, zelfs op donkere plaatsen.
2. Op afstand bestuurbaar robotvoertuig met touchscreen voor winkelbeheer
Dit project omvat het besturen van een robotvoertuig met behulp van een touchscreen eenheid voor bediening op afstand. Aan de zenderzijde is een aanraakscherm geplaatst, en een pick-n-place robot wordt aan de ontvangerzijde geplaatst om een taak uit te voeren door op de signalen te reageren. De hardwarecomponenten die in dit project worden gebruikt, zijn onder meer een 8051-microcontroller, een aanraakscherm, antennes (zender-ontvangerzijde), een encoder, een decoder, DC-motoren, een robotlichaam, een batterij, enz.

Op touchscreen gebaseerde robotvoertuigzender
Zoals besproken in de spraakherkenningsmodule van het bovenstaande project, stuurt ook in dit project een touchscreenmodule de besturingssignalen die overeenkomen met de voertuigbeweging naar de microcontroller. De controller stuurt die signalen vervolgens naar de encoder en vervolgens naar de zender die de signalen uiteindelijk naar het ontvangercircuit verzendt.

Op touchscreen gebaseerde robotvoertuig-ontvanger
De antenne die aan de ontvangerzijde is geplaatst, ontvangt de RF-signalen van de zendende antenne, decodeert de gegevens en stuurt die gegevens vervolgens naar de microcontroller. Deze set-up heeft vier motoren die zijn gekoppeld aan de microcontroller: twee motoren voor de beweging van de arm en grijper en de andere twee voor de beweging van het lichaam. Al deze motoren worden aangedreven door een motor-driver-IC die continu de opdrachten van de microcontroller ontvangt.
Dit zijn de twee embedded systeemtoepassingen op het gebied van robotica. De real-time voorbeelden van de embedded systemen hebben u wellicht een beter begrip gegeven van het concept van de embedded systemen. Als u nog meer twijfels heeft over de implementatie van deze projecten, kunt u contact met ons opnemen door hieronder te reageren.
Fotocredits
- Embedded Systems-toepassingen oocities
- Ingebouwde systeemhardware en software dca-ontwerp








{kind=link}