Een circuit waarmee een gebruiker de snelheid van een aangesloten motor lineair kan regelen door een aangesloten potentiometer te draaien, wordt een motortoerentalregelaarcircuit genoemd.
Hier worden 3 eenvoudig te bouwen snelheidsregelaarcircuits voor DC-motoren gepresenteerd, één met MOSFET IRF540, tweede met IC 555 en het derde concept met IC 556 met koppelverwerking.
Ontwerp # 1: op Mosfet gebaseerde DC-motorsnelheidsregelaar
Een heel cool en gemakkelijk DC-motortoerentalregelaarcircuit kan worden gebouwd met slechts een enkele mosfet, een weerstand en een pot, zoals hieronder wordt weergegeven:

Met behulp van een BJT-zendervolger

Zoals te zien is, is de mosfet opgetuigd als een bronvolger of een algemene afvoermodus, voor meer informatie over deze configuratie kunt u verwijs naar dit bericht , waarin een BJT-versie wordt besproken, blijft het werkingsprincipe hetzelfde.
In het bovenstaande ontwerp van de DC-motorcontroller creëert de potaanpassing een variërend potentiaalverschil over de poort van de mosfet, en de bronpin van de mosfet volgt eenvoudig de waarde van dit potentiaalverschil en past de spanning over de motor dienovereenkomstig aan.
Het impliceert dat de bron altijd 4 of 5 V achterblijft bij de poortspanning en met dit verschil omhoog / omlaag varieert, waarbij een variërende spanning tussen 2 V en 7 V over de motor wordt gepresenteerd.
Wanneer de poortspanning ongeveer 7V is, zal de bronpin de minimale 2V aan de motor leveren, wat een zeer langzame spin op de motor veroorzaakt, en 7V zal beschikbaar zijn over de bronpin wanneer de potaanpassing de volledige 12V genereert over de poort van de mosfet.
Hier kunnen we duidelijk zien dat de mosfet source pin de poort lijkt te 'volgen' en vandaar de naam source follower.
Dit komt doordat het verschil tussen de gate en de source pin van de mosfet altijd rond de 5V moet zijn om de mosfet optimaal te laten geleiden.
Hoe dan ook, de bovenstaande configuratie helpt om een soepele snelheidsregeling op de motor af te dwingen, en het ontwerp zou vrij goedkoop kunnen worden gebouwd.
Een BJT zou ook kunnen worden gebruikt in plaats van de mosfet, en in feite zou een BJT een hoger regelbereik van ongeveer 1V tot 12V over de motor produceren.
Videodemo
https://youtu.be/W762NTuQ19gAls het gaat om het uniform en efficiënt regelen van de motorsnelheid, wordt een op PWM gebaseerde controller de ideale optie, hier zullen we meer leren over een eenvoudig circuit om deze bewerking te implementeren.
Ontwerp # 2: PWM-gelijkstroommotorbesturing met IC 555
Het ontwerp van een eenvoudige motortoerentalregelaar die gebruikmaakt van PWM kan als volgt worden opgevat:
Aanvankelijk, wanneer het circuit wordt gevoed, bevindt de triggerpen zich in een logisch lage positie aangezien de condensator C1 niet is opgeladen.
De bovenstaande voorwaarden initieert de oscillatiecyclus, waardoor de output verandert naar een logisch hoog.
Een hoge output dwingt de condensator nu om via D2 op te laden.
Bij het bereiken van een spanningsniveau dat 2/3 van de voeding is, pin # 6, wat de drempel is van de IC-triggers.
Op het moment dat pin # 6 wordt geactiveerd, keert pin # 3 en pin # 7 terug naar logisch laag.
Met pin # 3 op laag, begint C1 opnieuw te ontladen via D1, en wanneer de spanning over C1 onder het niveau valt dat 1/3 van de voedingsspanning is, worden pin # 3 en pin # 7 weer hoog, waardoor de cyclus volgt en ga door met herhalen.
Het is interessant om op te merken dat C1 twee discreet ingestelde paden heeft voor het proces van opladen en ontladen via respectievelijk de diodes D1, D2 en via de weerstandsarmen die zijn ingesteld door de pot.
Dit betekent dat de som van de weerstanden die C1 tegenkomt tijdens het opladen en ontladen hetzelfde blijft, ongeacht hoe de pot is ingesteld, daarom blijft de golflengte van de afgegeven puls altijd hetzelfde.
Aangezien de oplaad- of ontlaadtijdsperioden echter afhangen van de weerstandswaarde die op hun paden wordt aangetroffen, stelt de pot discreet deze tijdsperioden in volgens de aanpassingen.
Aangezien de laad- en ontlaadtijden rechtstreeks verband houden met de uitgangscyclus, varieert deze met de instelling van de pot, waardoor de beoogde variërende PWM-pulsen aan de uitgang vorm krijgen.
Het gemiddelde resultaat van de mark / space-verhouding geeft aanleiding tot de PWM-uitgang die op zijn beurt de DC-snelheid van de motor regelt.
De PWM-pulsen worden naar de poort van een mosfet gevoerd die reageert en de aangesloten motorstroom regelt als reactie op de instelling van de pot.
Het huidige niveau door de motor bepaalt de snelheid en implementeert zo het controlerende effect via de pot.
De frequentie van de output van de IC kan worden berekend met de formule:
F = 1,44 (VR1 * C1)
De mosfet kan worden geselecteerd volgens de vereiste of de laadstroom.
Het schakelschema van de voorgestelde DC-motorsnelheidsregelaar is hieronder te zien:

Voorlopig ontwerp:

Bewijs van videotesten:
https://youtu.be/M-F7MWcSiFYIn de bovenstaande videoclip kunnen we zien hoe het op IC 555 gebaseerde ontwerp wordt gebruikt voor het regelen van de snelheid van een DC-motor. Zoals je misschien ziet, werkt de lamp weliswaar perfect in reactie op de PWM's en varieert de intensiteit van minimaal gloeien tot maximaal laag, maar de motor doet dat niet.
De motor reageert aanvankelijk niet op de smalle PWM's, maar begint met een schok nadat de PWM's zijn aangepast aan aanzienlijk hogere pulsbreedtes.
Dit betekent niet dat het circuit problemen heeft, het is omdat het DC-motoranker stevig tussen een paar magneten wordt vastgehouden. Om een start te initiëren, moet het anker zijn rotatie over de twee polen van de magneet springen, wat niet kan gebeuren met een langzame en zachte beweging. Het moet beginnen met een stuwkracht.
Dat is precies waarom de motor in eerste instantie een hogere aanpassing voor de PWM vereist en zodra de rotatie eenmaal is geïnitieerd, krijgt het anker wat kinetische energie en wordt het bereiken van een lagere snelheid nu haalbaar door smallere PWM's.
Toch kan het onmogelijk zijn om de rotatie naar een nauwelijks bewegende, langzame status te brengen vanwege dezelfde reden als hierboven uitgelegd.
Ik heb mijn best gedaan om de respons te verbeteren en een zo langzaam mogelijke PWM-besturing te bereiken door een paar wijzigingen aan te brengen in het eerste diagram, zoals hieronder wordt weergegeven:

Dit gezegd hebbende, zou de motor een betere controle kunnen vertonen op de langzamere niveaus als de motor is bevestigd of vastgebonden met een belasting door tandwielen of katrolsysteem.
Dit kan gebeuren omdat de last als een demper werkt en helpt om een gecontroleerde beweging te bieden tijdens de langzamere snelheidsaanpassingen.
Ontwerp 3: IC 556 gebruiken voor verbeterde snelheidsregeling
De snelheid van een gelijkstroommotor variëren lijkt misschien niet zo moeilijk en misschien vindt u er genoeg circuits voor.
Deze circuits garanderen echter geen consistente koppelniveaus bij lagere motortoerentallen, waardoor de werking behoorlijk inefficiënt is.
Bovendien heeft de motor bij zeer lage toerentallen als gevolg van onvoldoende koppel de neiging af te slaan.
Een ander ernstig nadeel is dat er geen motoromkeerfunctie bij deze circuits is inbegrepen.
De voorgestelde schakeling is volledig vrij van de bovengenoemde tekortkomingen en kan zelfs bij de laagst mogelijke snelheden hoge koppels genereren en behouden.
Circuit werking
Voordat we het voorgestelde PWM-motorcontrolecircuit bespreken, willen we ook het eenvoudigere alternatief leren kennen dat niet zo efficiënt is. Desalniettemin kan het als redelijk goed worden beschouwd zolang de belasting over de motor niet hoog is en zolang het toerental niet tot het minimum wordt teruggebracht.
De afbeelding laat zien hoe een enkele 556 IC kan worden gebruikt voor het regelen van de snelheid van een aangesloten motor, we gaan niet in op de details, het enige opvallende nadeel van deze configuratie is dat het koppel recht evenredig is met de snelheid van de motor.
Terugkomend op het voorgestelde circuitontwerp voor snelheidsregelaars met hoge koppel, hebben we hier twee 555 IC's gebruikt in plaats van een of liever een enkele IC 556 die twee 555 IC's in één pakket bevat.
Schakelschema

Belangrijkste kenmerken
Kort het voorgestelde DC-motorcontroller bevat de volgende interessante functies:
De snelheid kan traploos van nul tot maximaal worden gevarieerd, zonder af te slaan.
Het koppel wordt nooit beïnvloed door de snelheidsniveaus en blijft zelfs bij minimale snelheden constant.
De motorrotatie kan binnen een fractie van een seconde worden omgedraaid of omgekeerd.
De snelheid is variabel in beide draairichtingen van de motor.
De twee 555 IC's krijgen twee aparte functies toegewezen. Eén sectie is geconfigureerd als een stabiele multivibrator die 100 Hz blokgolfklokken genereert die naar de voorgaande 555 sectie in de verpakking worden gevoerd.
De bovenstaande frequentie is verantwoordelijk voor het bepalen van de frequentie van de PWM.
De transistor BC 557 wordt gebruikt als constante stroombron die de aangrenzende condensator aan zijn collectorarm geladen houdt.
Dit ontwikkelt een zaagtandspanning over de bovenstaande condensator, die wordt vergeleken in de 556 IC met de bemonsteringsspanning die extern wordt aangelegd over de getoonde pin-out.
De extern toegepaste bemonsteringsspanning kan worden afgeleid uit een eenvoudig 0-12V voedingscircuit met variabele spanning.
Deze variërende spanning die wordt aangelegd aan de 556 IC wordt gebruikt om de PWM van de pulsen aan de uitgang te variëren en die uiteindelijk wordt gebruikt voor de snelheidsregeling van de aangesloten motor.
De schakelaar S1 wordt gebruikt om de motorrichting onmiddellijk om te keren wanneer dat nodig is.
Onderdelen lijst
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 ohm,
- R7, R8, R9, R10 = 470 ohm,
- C1 = 0,1 uF,
- C2, C3 = 0,01 uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = SPDT-tuimelschakelaar
Het bovenstaande circuit is geïnspireerd op het volgende motorstuurcircuit dat lang geleden is gepubliceerd in het tijdschrift elecktor electronic India.
Het motorkoppel regelen met behulp van IC 555

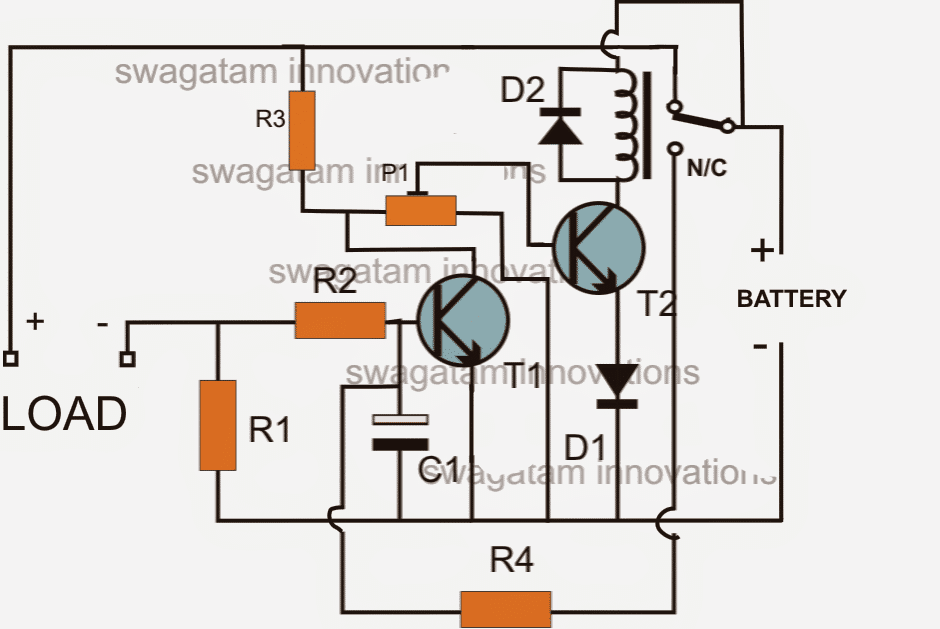
Het eerste motorbesturingsschema kan aanzienlijk worden vereenvoudigd door een DPDT-schakelaar te gebruiken voor de motoromkering en door een emittervolger-transistor te gebruiken voor de implementatie van de snelheidsregeling, zoals hieronder weergegeven:

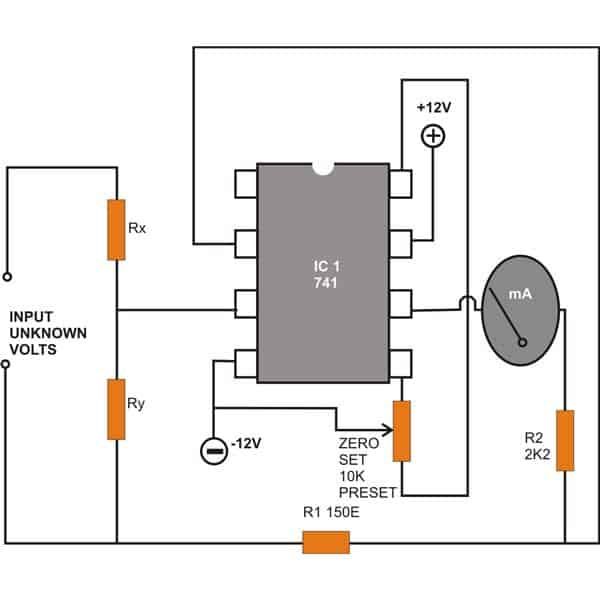
Precisiemotorbesturing met een enkele Op Amp
Een extreem verfijnde of ingewikkelde besturing van een d.c. motor kan worden bereikt door gebruik te maken van een op-amp en een tacho-generator. De op-amp is opgetuigd als een spanningsgevoelige schakelaar. In het hieronder gedemonstreerde circuit, zodra de output van de tachogenerator lager is dan de vooraf ingestelde referentiespanning, wordt de schakeltransistor ingeschakeld en wordt 100% vermogen aan de motor geleverd.
De schakelactie van de opamp zou plaatsvinden in slechts een paar millivolt rond de referentiespanning. U hebt een dubbele voeding nodig, die mogelijk alleen zener-gestabiliseerd is.

Deze motorcontroller maakt een traploos instelbaar bereik mogelijk zonder enige vorm van mechanisch gedoe.
De opamp-output is slechts +/- 10% van het niveau van de toevoerrails, waardoor met een dubbele emittervolger enorme motorsnelheden kunnen worden gecontroleerd.
De referentiespanning kan worden vastgesteld door middel van thermistors, of een LDR enz. De experimentele opstelling aangegeven in het schakelschema maakte gebruik van een RCA 3047A opamp en een 0.25W 6V motor als tacho-generator die ongeveer 4V genereerde bij 13000 tpm voor de beoogde feedback.
Vorige: 3 beste Joule-diefcircuits Volgende: Snelkookpan Whistle Counter Circuit