In de periode van de 18theeuw zelf, was er de evolutie van DC-motoren. De ontwikkeling van DC-motoren is sterk verbeterd en ze worden aanzienlijk toegepast in meerdere industrieën. In de vroege periode van de 19e eeuw en met de verbeteringen die in het jaar 1832 werden aangebracht, werden aanvankelijk DC-motoren ontwikkeld door de Britse onderzoeker Sturgeon. Hij vond de eerste gelijkstroommotor van het commutatortype uit, waarmee hij ook machines kan simuleren. Maar je kunt je afvragen wat de functionaliteit van de DC-motor is en waarom het belangrijk is om te weten over de snelheidsregeling van de DC-motor. Dit artikel legt dus duidelijk de werking en verschillende technieken voor snelheidsregeling uit.
Wat is een DC-motor?
Een DC-motor wordt aangedreven door gelijkstroom, waar deze de ontvangen elektrische energie omzet in mechanische energie. Dit veroorzaakt een rotatieverandering in het apparaat zelf, waardoor het vermogen wordt geleverd om verschillende applicaties in meerdere domeinen uit te voeren.
De snelheidsregeling van de DC-motor is een van de handigste kenmerken van de motor. Door de snelheid van de motor te regelen, kunt u de snelheid van de motor variëren volgens de vereisten en de vereiste werking krijgen.
Het snelheidscontrolemechanisme is in veel gevallen toepasbaar, zoals het besturen van de beweging van robotvoertuigen, beweging van motoren in papierfabrieken en de beweging van motoren in liften waar verschillende soorten DC-motoren worden gebruikt.
Werkingsprincipe van DC-motor
Een eenvoudige gelijkstroommotor werkt volgens het principe dat wanneer een stroomvoerende geleider in een magnetische trouw d, het ervaart een mechanische kracht. In een praktische gelijkstroommotor is het anker de stroomvoerende geleider en levert het veld een magnetisch veld.
Wanneer de geleider (anker) van stroom wordt voorzien, produceert deze zijn eigen magnetische flux. De magnetische flux telt ofwel op bij de magnetische flux als gevolg van de veldwikkelingen in één richting of heft de magnetische flux op als gevolg van veldwikkelingen. De accumulatie van magnetische flux in de ene richting in vergelijking met de andere oefent een kracht uit op de geleider en daarom begint deze te roteren.
Volgens de wet van elektromagnetische inductie van Faraday produceert de roterende werking van de geleider een EMF Deze EMF neigt volgens de wet van Lenz de oorzaak, d.w.z. de geleverde spanning, tegen te gaan. Een gelijkstroommotor heeft dus de zeer speciale eigenschap dat hij zijn koppel aanpast in geval van wisselende belasting als gevolg van de tegen-EMF.
Waarom is de snelheidsregeling van de DC-motor belangrijk?
Snelheidsregeling in de machine toont een impact op de rotatiesnelheid van de motor waar deze directe invloed heeft op de machinefunctionaliteit en zo belangrijk is voor de prestatie en het resultaat van de prestatie. Op het moment van boren heeft elk soort materiaal zijn eigen rotatiesnelheid en het verandert ook op basis van de boormaat.
In het scenario van pompinstallaties zal er een verandering zijn in de doorvoersnelheid en daarom moet een transportband synchroon lopen met de functionele snelheid van het apparaat. Deze factoren zijn direct of indirect afhankelijk van de snelheid van de motor. Daarom moet men rekening houden met het DC-motortoerental en verschillende soorten snelheidsregelmethoden in acht nemen.
De snelheidsregeling van de DC-motor wordt handmatig gedaan door de werknemer of met behulp van een automatisch besturingsinstrument. Dit lijkt in tegenstelling tot snelheidsbegrenzing waarbij snelheidsregeling moet worden toegepast die de natuurlijke variatie in de snelheid tegengaat vanwege de variatie in de asbelasting.
Het principe van snelheidsregeling
Uit de bovenstaande figuur is de spanningsvergelijking van een simpele DC-motor is
V = Eb + IaRa
V is de geleverde spanning, Eb is de achter-EMF, Ia is de ankerstroom en Ra is de ankerweerstand.
Dat weten we al
Eb = (PøNZ) / 60A.
P - aantal polen,
Een constante
Z - aantal geleiders
N- de snelheid van de motor
Als we de waarde van Eb in de spanningsvergelijking vervangen, krijgen we
V = (PøNZ) / 60A) + IaRa
Of, V - IaRa = (PøNZ) / 60A
d.w.z. N = (PZ / 60A) (V - IaRa) / ø
De bovenstaande vergelijking kan ook worden geschreven als:
N = K (V - IaRa) / ø, K is een constante
Dit impliceert drie dingen:
- De snelheid van de motor is recht evenredig met de voedingsspanning.
- De snelheid van de motor is omgekeerd evenredig met de spanningsval van het anker.
- De snelheid van de motor is omgekeerd evenredig met de flux vanwege de bevindingen in het veld
De snelheid van een DC-motor kan dus op drie manieren worden geregeld:
- Door de voedingsspanning te variëren
- Door de flux te variëren, en door de stroom door de veldwikkeling te variëren
- Door de ankerspanning te variëren, en door de ankerweerstand te variëren
Meerdere technieken van DC-motor snelheidsregeling
Omdat er twee soorten DC-motoren zijn, zullen we hier duidelijk de snelheidsregelmethoden van zowel DC-serie als shuntmotoren.
DC-motorsnelheidsregeling in serietypes
Het kan worden onderverdeeld in twee typen en dat zijn:
- Ankergestuurde techniek
- Veldgestuurde techniek
De ankergestuurde techniek wordt verder onderverdeeld in drie typen
- Ankergestuurde weerstand
- Shunted ankerbesturing
- Ankeraansluitspanning
Anker gecontroleerde weerstand
Deze techniek wordt het meest toegepast waar de regelweerstand een serieschakeling heeft met die van de motorvoeding. De onderstaande afbeelding legt dit uit.

Ankerweerstandscontrole
Het vermogensverlies dat optreedt in de regelweerstand van de motor van de DC-serie kan worden genegeerd, omdat deze regeltechniek meestal gedurende een lange periode wordt gebruikt om de snelheid te verlagen ten tijde van lichtbelastingsscenario's. Het is een kosteneffectieve techniek voor aanhoudend koppel en wordt voornamelijk toegepast bij het aandrijven van kranen, treinen en andere voertuigen.
Gerangeerde ankerregeling
Hier bevindt de reostaat zich zowel in serie als in shuntverbinding met het anker. Er zal een verandering optreden in het spanningsniveau dat op het anker wordt toegepast en dit varieert door de reeks te veranderen reostaat Terwijl de verandering in excitatiestroom plaatsvindt door de shuntreostaat te veranderen. Deze techniek voor het regelen van de snelheid in een DC-motor is niet zo duur vanwege aanzienlijke vermogensverliezen in snelheidsregelweerstanden. De snelheid kan tot op zekere hoogte worden geregeld, maar niet boven het normale snelheidsniveau.

Methode voor snelheidsregeling van gelijkstroommotor met shuntanker
Anker Terminal Voltage
De snelheid van een DC-seriemotor kan ook worden gedaan door de motor van stroom te voorzien met behulp van een individueel gevarieerde voedingsspanning, maar deze benadering is duur en niet uitgebreid geïmplementeerd.
De veldgestuurde techniek wordt verder onderverdeeld in twee typen:
- Veldomleider
- Controle van getikt veld (Tapped field control)
Field Diverter-techniek
Deze techniek maakt gebruik van een omleider. De fluxsnelheid die over het veld is, kan worden verminderd door een deel van de motorstroom over het serieveld te shunten. Hoe kleiner de weerstand van de omleider, de veldstroom is minder. Deze techniek wordt gebruikt voor meer dan het normale snelheidsbereik en wordt toegepast bij elektrische aandrijvingen waarbij de snelheid toeneemt wanneer de belasting afneemt.

Veldomleider DC-motor snelheidsregeling
Controle van afgetapt veld
Ook hier zal, met de vermindering van de flux, de snelheid worden verhoogd en dit wordt bereikt door het verminderen van de veldwikkelingsomwentelingen van waaruit de stroom stroomt. Hier wordt het aantal tikken in de veldwikkeling eruit gehaald en deze techniek wordt gebruikt bij elektrische tracties.
Snelheidsregeling van DC-shuntmotor
Het kan worden onderverdeeld in twee typen en dat zijn:
- Veldgestuurde techniek
- Ankergestuurde techniek
Veldbesturingsmethode voor DC-shuntmotor
Bij deze methode wordt de magnetische flux als gevolg van de veldwikkelingen gevarieerd om de snelheid van de motor te variëren.
Omdat de magnetische flux afhangt van de stroom die door de veldwikkeling vloeit, kan deze worden gevarieerd door de stroom door de veldwikkeling te variëren. Dit kan worden bereikt door een variabele weerstand te gebruiken in serie met de veldwikkelingweerstand.
Aanvankelijk, wanneer de variabele weerstand op zijn minimumpositie wordt gehouden, vloeit de nominale stroom door de veldwikkeling als gevolg van een nominale voedingsspanning, en als resultaat wordt de snelheid normaal gehouden. Wanneer de weerstand geleidelijk wordt verhoogd, neemt de stroom door de veldwikkeling af. Dit vermindert op zijn beurt de geproduceerde flux. De snelheid van de motor neemt dus toe tot boven zijn normale waarde.
Ankerweerstandbesturingsmethode voor DC-shuntmotor
Met deze methode kan de snelheid van de DC-motor worden geregeld door de ankerweerstand te regelen om de spanningsval over het anker te regelen. Deze methode maakt ook gebruik van een variabele weerstand in serie met het anker.
Wanneer de variabele weerstand zijn minimumwaarde bereikt, is de ankerweerstand normaal en daarom daalt de ankerspanning. Wanneer de weerstandswaarde geleidelijk wordt verhoogd, neemt de spanning over het anker af. Dit leidt op zijn beurt tot een afname van het toerental van de motor.
Met deze methode wordt de snelheid van de motor onder zijn normale bereik bereikt.
Anker-spanningsregelmethode voor DC-shuntmotor (Ward Leonard-methode)
De Ward Leonard-techniek van DC-motortoerentalregelcircuit wordt als volgt weergegeven:
In de bovenstaande afbeelding is M de hoofdmotor waarvan de snelheid moet worden geregeld en G komt overeen met een individueel aangeslagen gelijkstroomgenerator waar deze wordt aangedreven door een driefasemotor te gebruiken en het kan een synchrone of inductiemotor zijn. Dit patroon van een combinatie van een DC-generator en een AC-aangedreven motor wordt M-G-set genoemd.
De generatorspanning wordt gevarieerd door de veldstroom van de generator te veranderen. Dit spanningsniveau wanneer geleverd aan het ankergedeelte van de DC-motor en vervolgens M wordt gevarieerd. Om de flux van het motorveld constant te houden, moet de motorveldstroom constant worden gehouden. Wanneer het motortoerental wordt geregeld, moet de ankerstroom voor de motor hetzelfde zijn als die van het nominale niveau.
De geleverde veldstroom zal anders zijn, zodat het ankerspanningsniveau varieert van '0' tot het nominale niveau. Omdat de snelheidsregeling overeenkomt met de nominale stroom en met de aanhoudende veldflux van de motor en de veldflux tot wanneer het nominale toerental wordt bereikt. En aangezien het vermogen het product is van snelheid en koppel, en het in directe verhouding staat tot de snelheid. Hiermee neemt de snelheid toe wanneer het vermogen toeneemt.
Beide bovengenoemde methoden kunnen geen snelheidsregeling in het gewenste bereik bieden. Bovendien kan de fluxbesturingsmethode de commutatie beïnvloeden, terwijl de ankerbesturingsmethode enorm vermogensverlies met zich meebrengt vanwege het gebruik van een weerstand in serie met het anker. Daarom is vaak een andere methode wenselijk: degene die de voedingsspanning regelt om het motortoerental te regelen.
Bijgevolg worden met de Ward Leonard-techniek de instelbare krachtaandrijving en de constante waarde van het koppel verkregen van het snelheidsniveau minimaal tot het niveau van de basissnelheid. De veldfluxregulatietechniek wordt voornamelijk gebruikt wanneer het snelheidsniveau hoger is dan dat van de basissnelheid.
Hier, in de functionaliteit, wordt de ankerstroom op een constant niveau gehouden op de gespecificeerde waarde en wordt de spanningswaarde van de generator constant gehouden. Bij een dergelijke methode krijgt de veldwikkeling een vaste spanning en krijgt het anker een variabele spanning.
Een van deze technieken voor de spanningsregelmethode omvat het gebruik van een schakelmechanisme om een variabele spanning aan het anker te leveren, en de andere gebruikt een door een AC-motor aangedreven generator om een variabele spanning aan het anker te leveren (de Ward-Leonard-systeem
De voor- en nadelen van de afdeling Leonard metho d zijn:
De voordelen van het gebruik van de Ward Leonard-techniek voor snelheidsregeling van de DC-motor zijn als volgt:
- In beide richtingen kan men de snelheid van het apparaat op een soepele manier regelen voor een groter bereik
- Deze techniek heeft een intrinsiek remvermogen
- De achterblijvende reactieve volt-ampère wordt gecompenseerd door een aandrijving en de uitgebreid geëxciteerde synchrone motor fungeert als de aandrijving, dus er zal een toename zijn in de arbeidsfactor
- Als er een knipperende belasting is, is de aandrijfmotor de inductiemotor met een vliegwiel dat wordt gebruikt om de knipperbelasting tot een minimum te beperken
De nadelen van de Ward Leonard-techniek zijn:
- Omdat deze techniek een set motor en generator heeft, zijn de kosten hoger
- Het apparaat is ingewikkeld om te ontwerpen en heeft ook een zwaargewicht
- Meer ruimte nodig voor installatie
- Vereist regelmatig onderhoud en fundering is niet rendabel
- Er zullen enorme verliezen zijn en dus wordt de efficiëntie van het systeem verminderd
- Er wordt meer ruis gegenereerd
En de toepassing van de Ward Leonard-methode is een soepele regeling van de snelheid in de DC-motor. Enkele voorbeelden zijn mijntakels, papierfabrieken, liften, walserijen en kranen.
Afgezien van deze twee technieken is de meest gebruikte techniek de snelheidsregeling van DC-motor met behulp van PWM om snelheidsregeling van een DC-motor te bereiken. PWM omvat de toepassing van pulsen van verschillende breedte op de motoraandrijving om de spanning die op de motor wordt toegepast te regelen. Deze methode blijkt zeer efficiënt te zijn omdat het stroomverlies tot een minimum wordt beperkt en er geen complexe apparatuur voor nodig is.

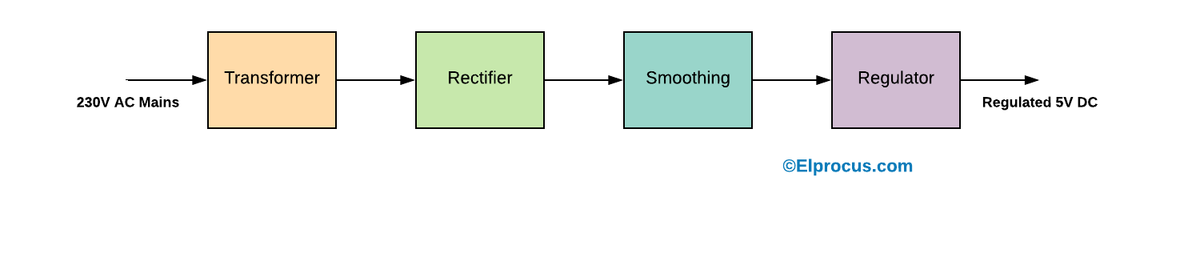
Spanningsregeling methode
Het bovenstaande blokschema is een eenvoudig elektrische motor snelheidsregelaar Zoals weergegeven in het bovenstaande blokschema, wordt een microcontroller gebruikt om PWM-signalen naar de motoraandrijving te sturen. De motordriver is een L293D IC die bestaat uit H-brugcircuits om de motor aan te drijven.
PWM wordt bereikt door de pulsen die op de activeringspin van het motorstuur-IC worden toegepast te variëren om de aangelegde spanning van de motor te regelen. De variatie van pulsen wordt gedaan door de microcontroller, met het ingangssignaal van de drukknoppen. Hier zijn twee drukknoppen voorzien, elk voor het verlagen en verhogen van de duty-cycle van pulsen.
Dit artikel heeft dus een gedetailleerde uitleg gegeven van verschillende technieken van DC-motortoerentalregeling en hoe snelheidsregeling het belangrijkst is om in acht te nemen. Het wordt verder aanbevolen om hiervan op de hoogte te zijn de 12v dc motor snelheidsregelaar



![4 Simple Clap Switch Circuits [getest]](https://electronics.jf-parede.pt/img/4017-ic-circuits/21/4-simple-clap-switch-circuits.png)