In dit deel van het artikel leren we over een innovatieve methode om het pedaalbedieningsmechanisme in elektrische voertuigen om te zetten in een overeenkomstig variërend elektrisch signaal, dat verder kan worden gebruikt voor het verwerken van de snelheidsregeling van het voertuig.
Het toegelichte concept zal werken als een elektronisch gaspedaal, dat de voertuigsnelheid lineair verhoogt wanneer het pedaal geleidelijk wordt ingedrukt, en vice versa, met behulp van PWM-technologie.
Het idee is aangevraagd door de heer Lokesh Maini
Technische specificaties
Ik ben een mechanische man, momenteel werkend aan een elektrisch voertuig en ik wil de snelheid van mijn motor met pedalen regelen. ik krijg geen controller voor mijn motor, help me alsjeblieft om mijn eigen te bouwen, ik zal het hoog vinden
dankbaar
Motorspecificaties zijn 36 volt, 43 ampère en 1,5 pk geborstelde gelijkstroommotor.
Het mechanische ontwerp
Een elektronische versie van een pedaalversneller zal in de eerste plaats een mechanisme nodig hebben om eerst het mechanisch indrukken van het pedaal om te zetten in een overeenkomstig variërend elektrisch signaal, zodat dit signaal door een signaalprocessor kan worden verwerkt voor de gewenste omzetting in een praktische snelheidsregeling van de voertuig.
Veel concepten kunnen worden uitgeprobeerd, zoals door een piëzo-belastingssensor, een capacitieve belastingssensor, een resonantiesensor enz. Te gebruiken. In dit artikel zullen we een veel eenvoudigere methode leren die door mij is bedacht, die een LED / LDR-assemblage bevat om hetzelfde te bereiken .

In de elektromechanische opstelling die in de bovenstaande afbeelding wordt weergegeven, kunnen we de volgende geïntegreerde componenten zien:
Een klein tandwiel bevestigd met een schroefmechanisme.
De kop van de schroef heeft een wit mat reflectoroppervlak
Een LED / LDR-eenheid voor de schroefkop.
Hoe het voorgestelde mechanisme werkt.
De versnelling die in de bovenstaande afbeelding wordt weergegeven, moet worden vergrendeld met een andere versnelling met een overbrengingsverhouding die 10 keer hoger kan zijn dan deze versnelling.
De grotere versnelling moet zo worden geconfigureerd met het pedaalmechanisme dat het een roterende beweging initieert als reactie op het indrukken van het pedaal.
De rotatiereactie van de tandwielen zal op zijn beurt een voorwaartse beweging van de schroefkop produceren over de kamer waar het LED / LDR-samenstel zich bevindt.
Het proces zorgt ervoor dat een proportioneel variërende hoeveelheid gereflecteerd licht van de LED door de LDR wordt ontvangen.
Deze variërende gegevens (in de vorm van een variërende weerstand) die overeenkomen met de pedaalindrukking, kunnen vervolgens worden toegevoerd aan een signaalprocessorcircuit om de beoogde snelheidsregeling van het specifieke voertuig af te dwingen.
In de volgend bericht we leren het stadium van de signaalprocessor met behulp van de PWM-techniek.
In de bovenstaande sectie we leerden over een eenvoudige elektromechanische omvormersamenstelling voor het omzetten van de pedaalwerking in een proportioneel variërend elektrisch signaal.
Pedaalactie omzetten in PWM
Laten we nu een circuitimplementatie bestuderen waarmee we het elektrische pedaalsignaal kunnen omzetten in een overeenkomstig variërend PWM-signaal voor de beoogde motortoerentalregeling van het voertuig.

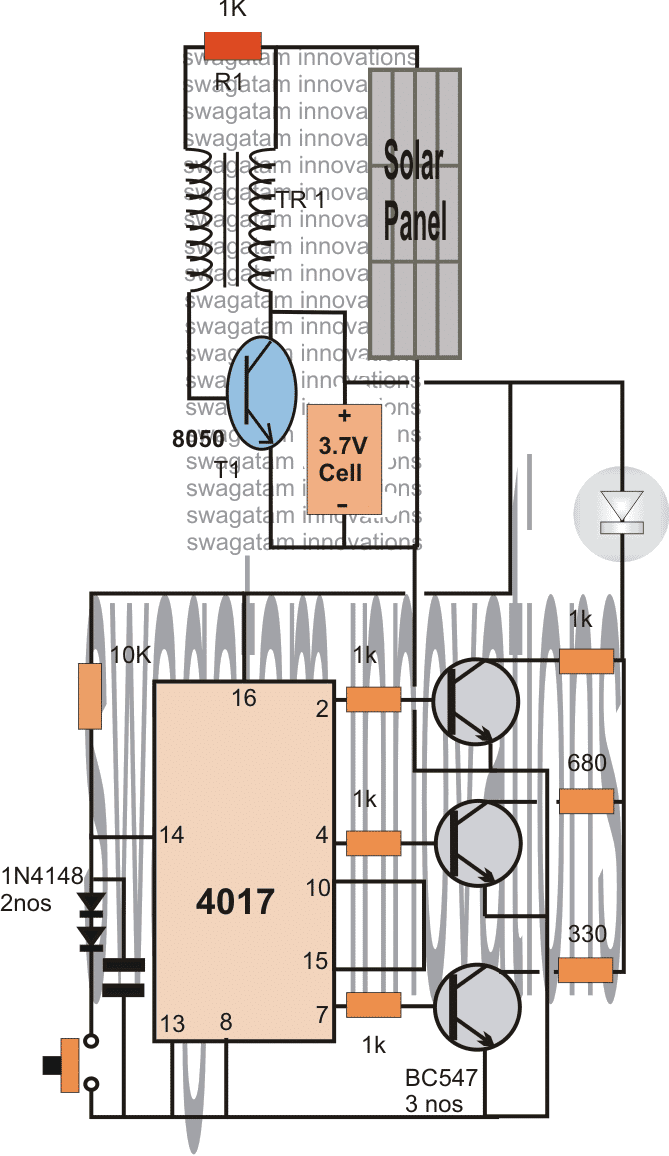
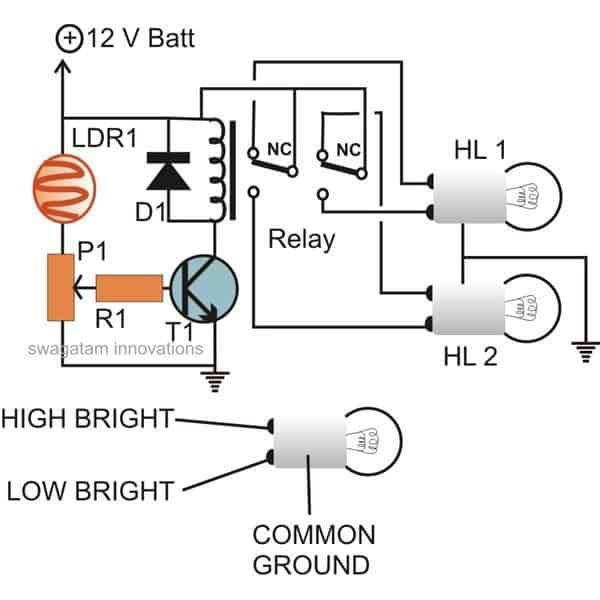
Verwijzend naar het bovenstaande schakelschema kunnen we de werking van het circuit beoordelen met behulp van de volgende punten:
IC1 is geconfigureerd als een 80Hz-pulsgenerator met maximale AAN-tijd en minimale UIT-tijd als werkcyclus
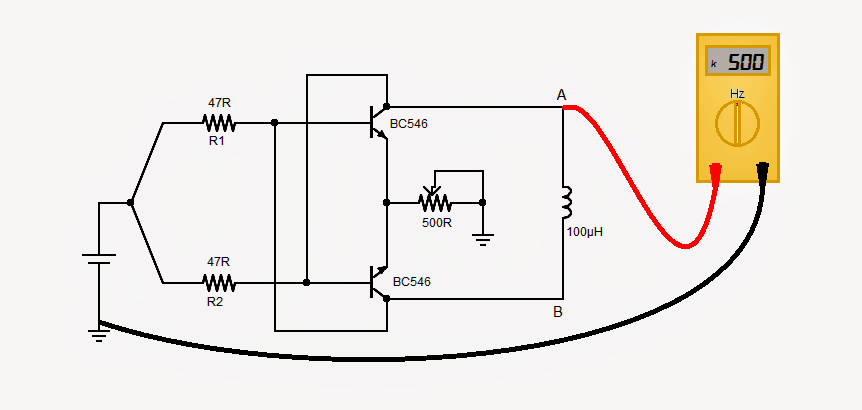
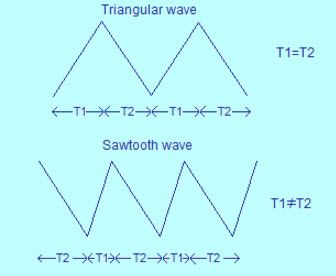
IC2 is opgetuigd als een comparator die eerst de bovenstaande 80Hz-puls, aangelegd op pin2, omzet met driehoeksgolven die worden gegenereerd op pin6 en de driehoeksgolven vergelijkt met de modulerende spanning die beschikbaar is op pin5.
De pin5 modulerende spanning is afgeleid van een BJT BC547-emitter die is geconfigureerd als een gemeenschappelijke collector waarvan de basis is verbonden met de LDR-ingangen die worden verkregen door de pedaalacties.
De variërende weerstanden als reactie op het indrukken van het pedaal worden vergeleken met de vooraf ingestelde 100K-instelling en een evenredige grootte van de spanning wordt ontwikkeld aan de basis van de transistor die de lage stroominvoer omzet in een equivalent hoog stroomsignaal via pin5 van IC2.
Dit momentane potentiaalniveau wordt geaccepteerd en verwerkt door IC2 en genereert een evenredige grootte van PWM-signalen voor de mosfet en de aangesloten motor.
De motorsnelheid wordt dus gecontroleerd en gevarieerd volgens de fluctuerende PWM's in reactie op het pedaal indrukken van het voertuig.
De bovenstaande procedures zetten de pedaalacties effectief om in een gecontroleerde werking van de voertuigmotor en zijn snelheid.
Hoe het circuit te installeren.
Het is erg makkelijk.
- Druk het pedaal zo ver mogelijk in zodat de schroefkop de dichtst mogelijke positie voor de LED / LDR-eenheid bereikt.
- Pas vervolgens de 100k-preset aan totdat pin3 van de IC2 begint met het genereren van PWM's met maximale breedte, dit kan worden bevestigd door de spanning op pin3 zo dicht mogelijk bij de voedingsspanning van het circuit te meten, dat wil zeggen 5V.
- Zodra dit is gebeurd, kan worden aangenomen dat de installatieprocedure voltooid is.
- De resultaten konden nu worden geverifieerd door het pedaal op verschillende niveaus in te drukken en te controleren of de motorsnelheid op identieke wijze varieert.
Een paar: Eenvoudig ESR-metercircuit Volgende: Hoe een kweeklichtcircuit te bouwen