
Invoering:
Tegenwoordig gebruiken veel industrieën robots vanwege hun hoge prestatieniveau en betrouwbaarheid, en dat is een grote hulp voor mensen. De robotica om obstakels te vermijden wordt gebruikt om obstakels te detecteren en de botsing te vermijden. Dit is een autonome robot. Het ontwerp van de obstakelvermijdingsrobot vereist de integratie van veel sensoren op basis van hun taak.
Obstakeldetectie is de eerste vereiste van deze autonome robot. De robot haalt de informatie uit de omgeving via op de robot gemonteerde sensoren. Sommige detectieapparaten die worden gebruikt voor obstakeldetectie, zoals stootsensoren, infraroodsensoren, ultrasone sensoren, enz. De ultrasone sensor is het meest geschikt voor obstakeldetectie en is goedkoop en heeft een groot bereik.

Obstakel vermijden Robotvoertuig
Werkend principe:
Het vermijden van obstakels robotvoertuig gebruikt ultrasone sensoren voor zijn bewegingen. Een microcontroller van 8051 families wordt gebruikt om de gewenste werking te bereiken. De motoren zijn via het motorstuurprogramma-IC verbonden met de microcontroller. De ultrasone sensor is voor de robot bevestigd.
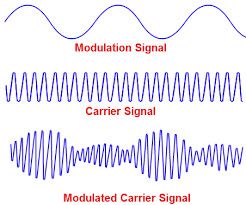
Telkens wanneer de robot het gewenste pad volgt, zendt de ultrasone sensor de ultrasone golven continu vanaf zijn sensorkop. Telkens wanneer er een obstakel voor komt, worden de ultrasone golven gereflecteerd door een object en die informatie wordt doorgegeven aan de microcontroller. De microcontroller stuurt de motoren links, rechts, achter, voor aan op basis van ultrasone signalen. Om de snelheid van elke motorpulsbreedte te regelen, wordt modulatie gebruikt (PWM).

Blokschema Obstakel vermijden Robotvoertuig
Verschillende sensoren gebruikt voor het vermijden van obstakels Robotvoertuig
1. Obstakeldetectie (IR-sensor):
De IR-sensoren worden gebruikt voor obstakeldetectie, het uitgangssignaal van de sensor wordt naar de microcontroller gestuurd. De microcontroller bestuurt het voertuig (vooruit / achteruit / stop) met behulp van de gelijkstroommotor die in het voertuig is geplaatst. Als een obstakel inline wordt geplaatst, ontvangt de IR-sensor de lichtstralen niet en geeft signalen aan de microcontroller. De microcontroller stopt het voertuig onmiddellijk en de sirene gaat aan. Na een minuut zal de robot de padstatus controleren als een obstakel is verwijderd, de robot beweegt ver woord anders keert de robot terug naar de startplaats. De sensor detecteert objecten door een korte ultrasone burst uit te zenden en vervolgens te luisteren naar de eco. Onder besturing van een host-microcontroller zendt de sensor een korte 40 kHz explosie uit. Deze explosie waagt of reist door de lucht, raakt een artikel en stuitert daarna weer naar de sensor. De sensor levert een uitvoerpuls aan de host die zal eindigen wanneer de echo wordt gedetecteerd, vandaar dat de breedte van de ene puls naar de volgende door een programma wordt meegenomen in de berekening om resultaten te leveren op een afstand van het object.
twee. Paddetectie (naderingssensor):
Normaal gesproken geven beide sensoren de richtlijnen en de robot volgt hem rechtdoor op het pad. Als de lijn op dat moment eindigt, keert de robot terug op 180 en keert terug op dezelfde plaats.

On-line zijn
De naderingssensoren worden gebruikt voor paddetectie. Wanneer de rechtersensor niet wordt gedetecteerd in de curvellijn, activeert de microcontroller de linkermotor om naar links te draaien totdat het signaal van de rechtersensor komt. Zodra het signaal is gedetecteerd rechtersensor, worden de twee motoren geactiveerd om vooruit te gaan. Als de lijn op dat moment eindigt, keert de robot terug op 180 en keert terug op dezelfde plaats.

De lijn verliezen
3. Ultrasoon sensor:
De ultrasone sensor wordt gebruikt voor obstakeldetectie. De ultrasone sensor zendt de ultrasone golven van zijn sensorkop en ontvangt opnieuw de ultrasone golven die door een object worden gereflecteerd.
Er zijn veel toepassingen die gebruik maken van ultrasone sensoren zoals instructie alarmsystemen, automatische deuropeners, etc. De ultrasone sensor is zeer compact en heeft een zeer hoge prestatie.

Algemeen diagram ultrasone sensor
Werkend principe:
De ultrasone sensor zendt het korte en hoogfrequente signaal uit. Deze planten zich voort in de lucht met de geluidssnelheid. Als ze een object raken, reflecteren ze een echosignaal naar de sensor. De ultrasone sensor bestaat uit een multivibrator, bevestigd aan de basis. De multivibrator is een combinatie van een resonator en een vibrator. De resonator levert een ultrasone golf die wordt gegenereerd door de trilling. De ultrasone sensor bestaat uit twee delen: de zender produceert een 40 kHz geluidsgolf en de detector detecteert een 40 kHz geluidsgolf en stuurt een elektrisch signaal terug naar de microcontroller.

Ultrasoon werkingsprincipe
De ultrasone sensor stelt de robot in staat om virtueel een object te zien en te herkennen, obstakels te vermijden en afstand te meten. Het werkingsbereik van de ultrasone sensor is 10 cm tot 30 cm.
Werking van de ultrasone sensor:
Wanneer een elektrische puls van hoge spanning wordt toegepast op de ultrasone transducer, trilt deze over een specifiek spectrum van frequenties en genereert een uitbarsting van geluidsgolven. Wanneer een obstakel voor de ultrasone sensor komt, zullen de geluidsgolven reflecteren in de vorm van een echo en een elektrische puls genereren. Het berekent de tijd tussen het verzenden van geluidsgolven en het ontvangen van de echo. De echopatronen worden vergeleken met de patronen van geluidsgolven om de toestand van het gedetecteerde signaal te bepalen.
Notitie: De ultrasone ontvanger zal het signaal van de ultrasone zender detecteren terwijl de zendgolven het object raken. Door de combinatie van deze twee sensoren kan de robot het object op zijn pad detecteren. De ultrasone sensor is voor de robot bevestigd en die sensor helpt de robot ook om door de hal van een gebouw te navigeren.
Toepassingen van ultrasone sensor:
- Automatische omschakeling van verkeerslichten
- Inbraakalarmsysteem
- Telinstrumenten toegang schakelaars parkeermeters
- Achterste sonar van auto's
Kenmerken van ultrasone sensor:
- Compact en lichtgewicht
- Hoge gevoeligheid en hoge druk
- Hoge betrouwbaarheid
- Stroomverbruik van 20mA
- Pulse in / out communicatie
- Smalle acceptatiehoek
- Biedt exacte, contactloze scheidingsschattingen binnen 2 cm tot 3 m
- De explosiepunt-LED toont schattingen in de voortgang
- 3-pins header maakt het eenvoudig om verbinding te maken met behulp van een servo-ontwikkelingslink
Toepassingen van robotvoertuigen om obstakels te vermijden:
- Vooral militaire toepassingen
- Het kan worden gebruikt voor stadsoorlogen
Heb nu duidelijk een idee gekregen over het concept van het robotvoertuig met behulp van een ultrasone sensor van obstakeldetectie. Als er nog meer vragen over dit onderwerp of het concept van de elektrische en elektronische projecten zijn, laat dan de onderstaande opmerkingen achter.
Foto tegoed:
- Algemeen diagram ultrasone sensor door Letsmakerobots
- Werkingsprincipe ultrasone sensor door Microsonic




{kind=link}