EEN servomotor werkt als een roterende actuator die voornamelijk wordt gebruikt om elektrische input om te zetten in mechanische versnelling. Deze motor werkt op basis van servomechanisme overal waar de positiefeedback wordt gebruikt voor het regelen van de snelheid en de uiteindelijke locatie van de motor. Servomotoren draaien en krijgen een bepaalde hoek op basis van de toegepaste input. Servomotoren zijn klein van formaat, maar ze zijn zeer energiezuinig. Deze motoren zijn ingedeeld in twee typen, zoals ac-servomotor en dc-servomotor, maar het belangrijkste verschil tussen deze twee motoren is de gebruikte stroombron. De prestatie van een DC-servomotor hangt voornamelijk af van de spanning, terwijl een AC-servomotor afhankelijk is van zowel de spanning als de frequentie. Dit artikel bespreekt een van de soorten servomotoren - een AC-servomotor – werken met applicaties.
Wat is een AC-servomotor?
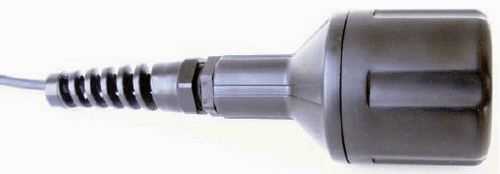
Een type servomotor dat mechanische uitvoer genereert door gebruik te maken van elektrische AC-invoer in de precieze hoeksnelheidsvorm, wordt een AC-servomotor genoemd. Het uitgangsvermogen van deze servomotor varieert voornamelijk van watt tot enkele 100 watt. De werkfrequentie van een ac-servomotor varieert van 50 tot 400 Hz. Het diagram van de AC-servomotor wordt hieronder weergegeven.

De belangrijkste kenmerken van ac-servomotoren omvatten voornamelijk; dit zijn apparaten met minder gewicht, die zorgen voor stabiliteit en betrouwbaarheid tijdens de werking, er wordt geen geluid gegenereerd tijdens de werking, ze bieden lineaire koppel-snelheidskarakteristieken en lagere onderhoudskosten wanneer sleepringen en borstels niet aanwezig zijn.
Raadpleeg deze link voor meer informatie over AC-servomotortypen
AC-servomotorconstructie
Over het algemeen is een AC-servomotor een tweefasige inductiemotor. Deze motor is geconstrueerd met behulp van een stator en een rotor als een normale inductiemotor. Over het algemeen heeft de stator van deze servomotor een gelamineerde structuur. Deze stator bevat twee wikkelingen die 90 graden uit elkaar in de ruimte zijn geplaatst. Door deze fasevariatie ontstaat een roterend magnetisch veld.

De eerste wikkeling staat bekend als de hoofdwikkeling of ook wel bekend als vaste fase- of referentiewikkeling. Hier wordt de hoofdwikkeling geactiveerd door de constante voedingsspanningsbron, terwijl de andere wikkeling zoals de stuurwikkeling of stuurfase wordt geactiveerd door de variabele stuurspanning. Deze stuurspanning wordt gewoon geleverd door een servoversterker.

Over het algemeen is de rotor verkrijgbaar in twee typen van het type eekhoornkooi en van het type sleepbeker. De rotor die in deze motor wordt gebruikt, is een normale rotor van het kooitype, inclusief aluminium staven die in sleuven zijn bevestigd en kortgesloten door eindringen. De luchtspleet wordt minimaal gehouden voor maximale fluxkoppeling. Het andere type rotor, zoals een sleepbeker, wordt voornamelijk gebruikt waar de traagheid van het roterende systeem laag wordt. Dit helpt dus bij het verminderen van het stroomverbruik.
Werkingsprincipe van AC-servomotor
Het werkingsprincipe van de ac-servomotor is; ten eerste wordt een constante wisselspanning gegeven aan de hoofdwikkeling van de servomotor van de starter en wordt een andere statoraansluiting eenvoudig aangesloten op de stuurtransformator door de stuurwikkeling. Vanwege de aangelegde referentiespanning zal de as van de synchrone generator met een bepaalde snelheid draaien en een bepaalde hoekpositie verkrijgen.

Daarnaast heeft de as van de stuurtransformator een bepaalde hoekstand die wordt vergeleken met het hoekpunt van de as van de synchrogenerator. Dus de vergelijking van twee hoekposities levert het foutsignaal op. Meer in het bijzonder worden de spanningsniveaus voor de equivalente asposities geëvalueerd, wat het foutsignaal oplevert. Dit foutsignaal communiceert dus met het huidige spanningsniveau op de stuurtransformator. Daarna wordt dit signaal aan de servoversterker gegeven zodat deze een ongelijkmatige stuurspanning genereert.
Door deze aangelegde spanning bereikt de rotor opnieuw een specifieke snelheid, begint de omwenteling en houdt aan totdat de waarde van het foutsignaal nul bereikt, zodat de gewenste positie van de motor binnen de AC-servomotoren wordt bereikt.
Overdrachtsfunctie van AC-servomotor
De overdrachtsfunctie van de ac-servomotor kan worden gedefinieerd als de verhouding van de L.T (Laplace Transform) van de uitgangsvariabele tot de L.T (Laplace Transform) van de ingangsvariabele. Het is dus het wiskundige model dat de differentiaalvergelijking uitdrukt die de o/p tot i/p van het systeem vertelt.
Als de T.F. (overdrachtsfunctie) van een willekeurig systeem bekend is, kan de uitvoerrespons worden berekend voor verschillende soorten invoer om de aard van het systeem te herkennen. Evenzo, als de overdrachtsfunctie (T.F) niet bekend is, kan deze experimenteel worden gevonden door eenvoudigweg bekende invoer toe te passen op het apparaat en de uitvoer van het systeem te bestuderen.
AC-servomotor is een tweefasige inductiemotor, wat betekent dat hij twee wikkelingen heeft, zoals een stuurwikkeling (hoofdveldwikkeling) en een referentiewikkeling (opwindende wikkeling).

We moeten dus de overdrachtsfunctie van een ac-servomotor achterhalen, d.w.z. θ (s) / ec (s). Hier is 'θ(s)/' de uitvoer van het systeem, terwijl de ex(s) de invoer van het systeem is.
Om de overdrachtsfunctie van de motor te achterhalen, moeten we weten wat het koppel is dat wordt ontwikkeld door de motor 'Tm' en het koppel dat wordt ontwikkeld door de belasting 'Tl'. Als we de evenwichtsvoorwaarde als gelijk stellen
Tm = Tl, dan kunnen we de overdrachtsfunctie krijgen.
Laat, Tm = koppel ontwikkeld door de motor.
Tl = koppel ontwikkeld door de belasting of het belastingskoppel.
'θ' = hoekverplaatsing.
'ω' = d θ/dt = hoeksnelheid.
‘J’ = traagheidsmoment van de last.
'B' is de spil van de lading.
Hier zijn de twee constanten waarmee rekening moet worden gehouden K1 en K2.
'K1' is de helling van de stuurfasespanning versus koppelkarakteristieken.
'K2' is de helling van de snelheidskoppelkarakteristieken.
Hier wordt het door de motor ontwikkelde koppel eenvoudigweg aangeduid met
Tm = K1ec- K2 dθ/dt —–(1)
Het belastingskoppel (TL) kan worden gemodelleerd door rekening te houden met de koppelbalansvergelijking.
Toegepast koppel = tegengesteld koppel als gevolg van J,B
Tl = TJ + TB = J d^2θ/dt^2 + B dθ/dt^2 + B —–(2)
We weten dat de evenwichtsvoorwaarde Tm = Tl.
K1ec- K2 dθ/dt = J d^2θ/dt^2 + B dθ/dt^2 + B
Pas de Laplace-transformatievergelijking toe op de bovenstaande vergelijking
K1Ec(s) – K2 S θ(S) = J S^2θ (S) + B S θ(S)
K1Ec(s) = JS^2θ (S) + BSθ(S)+ K2S θ(S)
K1Ec(s) = θ (S)[J S^2 + BS + K2S]
T.F = θ (S)Ec(s) = K1/ J S^2 + BS + K2S
= K1/ S [B + JS + K2]
= K1/ S [B + K2 + JS]
= K1/ S (B + K2) [1 + (J/ B + K2) *S]
T.F = θ (S)Ec(s) = K1/(B + K2) / S[1 + (J/ B + K2) *S]
T.F = Km / S[1 + (J/ B + K2) *S] => Km / S(1 + STm)] = θ (S)Ec(s)
T.F = Km / S(1 + STm)] = θ (S)Ec(s)
Waar, Km = K1/ B + K2 = constante motorversterking.
Tm = J/ B + K2 = motortijdconstante.
Methoden voor AC-servomotorsnelheidsregeling
Over het algemeen servo motoren hebben drie besturingsmethoden zoals positieregeling, koppelregeling en snelheidsregeling.
De positiebesturingsmethode wordt gebruikt om de grootte van de rotatiesnelheid te bepalen voor alle externe ingangsfrequentiesignalen. De omwentelingshoek wordt bepaald door het nr. van pulsen. De positie en snelheid van een servomotor kan via communicatie direct worden toegewezen. Aangezien de positie van de methode extreem strikte controle kan hebben over de positie en snelheid, wordt deze normaal gesproken gebruikt binnen de positioneringstoepassing.
Bij de koppelbesturingsmethode wordt het uitgangskoppel van de servomotor ingesteld door analoge ingang op het adres. Het kan het koppel veranderen door simpelweg de analoog in realtime te veranderen. Daarnaast kan het door middel van communicatie ook de waarde op het betreffende adres wijzigen.
In de snelheidsregelingsmodus kan het motortoerental worden geregeld via analoge ingang en puls. Als er precisievereisten zijn en u zich geen zorgen hoeft te maken over zoveel koppel, dan is de snelheidsmodus beter.
Kenmerken van AC-servomotor
De koppelsnelheidskarakteristieken van een ac-servomotor worden hieronder weergegeven. In de volgende kenmerken verandert het koppel met de snelheid maar niet lineair omdat het voornamelijk afhangt van de verhouding van reactantie (X) tot weerstand (R). De lage waarde van deze verhouding houdt in dat de motor een hoge weerstand en lage reactantie heeft, in dergelijke gevallen zijn de motorkarakteristieken meer lineair dan de hoge verhoudingswaarde voor reactantie (X) tot weerstand (R).

Voordelen
De voordelen van AC-servomotoren zijn de volgende.
- De snelheidsregelingskarakteristieken van deze motor zijn goed.
- Ze genereren minder warmte.
- Ze bieden een hoog rendement, meer koppel per gewicht, betrouwbaarheid en minder RF-ruis.
- Ze hebben minder onderhoud nodig.
- Ze hebben een langere levensverwachting als er geen commutator bestaat.
- Deze motoren kunnen hogere stroompieken in industriële machines aan.
- Bij hoge snelheden bieden ze een constanter koppel.
- Deze zijn zeer betrouwbaar.
- Ze bieden prestaties op hoge snelheid.
- Deze zijn zeer geschikt voor onstabiele belastingstoepassingen.
De nadelen van AC-servomotoren zijn de volgende.
- AC-servomotorbesturing is moeilijker.
- Deze motoren kunnen kapot gaan door constante overbelasting.
- Versnellingsbakken zijn vaak nodig om vermogen bij hoge snelheden over te brengen.
toepassingen
De toepassingen van AC-servomotoren omvatten het volgende.
- AC-servomotoren zijn van toepassing waar positieregeling belangrijk is en meestal wordt aangetroffen in halfgeleiderapparaten, robots, vliegtuigen en werktuigmachines.
- Deze motoren worden gebruikt in de instrumenten die werken op servomechanisme zoals in computers en positiecontrole-apparaten.
- AC-servomotor wordt gebruikt in werktuigmachines, robotica-machines en volgsystemen.
- Deze servomotoren worden in verschillende industrieën gebruikt vanwege hun efficiëntie en veelzijdigheid.
- De AC-servomotor wordt gebruikt in de meest voorkomende machines en apparaten zoals boilers, ovens, pompen, terreinwagens, apparatuur in tuinen, enz.
- Veel van de apparaten en gereedschappen die dagelijks in huis worden gebruikt, worden aangedreven door AC-servomotoren.
Dit is dus een overzicht van ac servomotoren – werken met applicaties. Deze motoren worden in veel toepassingen gebruikt, zoals instrumenten die werken op servomechanismen en ook werktuigmachines, volgsystemen en robotica. Hier is een vraag voor u, wat is een inductiemotor?