Een circuit waarmee een aangesloten motor met de klok mee en tegen de klok in kan werken via alternatieve ingangstriggers, wordt een bidirectioneel controllercircuit genoemd.
Het eerste ontwerp hieronder bespreekt een bidirectionele motorcontrollercircuit op basis van een volledige brug of H-brug met behulp van de 4 opamps van de IC LM324. In het tweede artikel leren we over een bidirectionele motorcontroller met hoog koppel met behulp van IC 556
Invoering
Over het algemeen, mechanische schakelaars zijn gewend om de draairichting van een DC-motor aan te passen. Pas de polariteit van de gebruikte spanning aan en de motor draait de tegenovergestelde richting!
Enerzijds kan dit het nadeel hebben dat er een DPDT-schakelaar moet worden toegevoegd om de polariteit van de spanning te veranderen, maar we hebben alleen te maken met een schakelaar die de procedure vrij eenvoudig maakt.
DPDT kan echter één ernstig probleem hebben, het wordt niet aanbevolen om de spanning over een DC-motor abrupt om te keren tijdens zijn roterende beweging. Dit kan resulteren in een stroompiek, die mogelijk de bijbehorende snelheidsregelaar kan verbranden.
Bovendien kan elke vorm van mechanische belasting soortgelijke problemen veroorzaken. Dit circuit verslaat deze complicaties gemakkelijk. De richting en snelheid worden gemanipuleerd met behulp van een solitaire potentiometer. Door de pot in een bepaalde richting te draaien, begint de motor te draaien.
Door de pot in de tegenovergestelde richting te schakelen, kan de motor in de omgekeerde beweging draaien. De middelste stand op de pot schakelt de motor UIT, zodat de motor eerst vertraagt en dan stopt voordat een poging wordt gedaan om de richting te veranderen.
Technische specificaties
Spanning: Het circuit en de motor maken gebruik van de gemeenschappelijke voeding. Dit houdt in dat omdat de hoogste werkspanning van de LM324 is 32VDC dit wordt eveneens de maximale spanning die toegankelijk is om de motor te laten werken.
Actueel: De IRFZ44 MOSFET is ontworpen voor 49A, de IRF4905 kan 74A aan. Desalniettemin kunnen de PCB-sporen die van de MOSFET-pinnen naar het schroefklemmenblok lopen, net ongeveer 5A aan. Dit kan worden verbeterd door stukjes koperdraad over de printsporen te solderen.
Zorg er in dat geval voor dat de MOSFET's niet te warm worden - als ze dat wel doen, zijn er grotere heatsinks nodig om op deze apparaten te monteren.
LM324-pinouts

BIDIRECTIONELE BESTURING VAN DC-MOTOREN MET LM324
In principe vindt u 3 manieren om pas de snelheid van DC-motoren aan
1. Door gemechaniseerde versnellingen te gebruiken om de ideale versnelling te bereiken: Deze benadering gaat vaak boven het gemak van de meerderheid van de enthousiastelingen die in thuisworkshops oefenen.
twee. Verlagen van de motorspanning via een voorweerstand. Dit kan zeker inefficiënt zijn (vermogen wordt gedissipeerd in weerstand) en ook resulteren in een vermindering van het koppel.
De stroom die door de motor wordt verbruikt, wordt ook hoger naarmate de motorbelasting toeneemt. Verhoogde stroom betekent een grotere spanningsval over de serieweerstand en dus een lagere spanning voor de motor.
De motor doet dan een poging om nog meer stroom te trekken, waardoor de motor afslaat.
3. Door de gehele voedingsspanning in korte pulsen op de motor aan te brengen: Met deze methode wordt het serie-uitvaleffect verwijderd. Dit wordt pulsbreedtemodulatie (PWM) genoemd en is de strategie die in dit circuit wordt aangetroffen. Snelle pulsen zorgen ervoor dat de motor langzaam kan werken. Verlengde pulsen laten de motor sneller draaien.

HOE HET WERKT (zie schema)
Het circuit kan in vier fasen worden verdeeld:
1. Motorbesturing - IC1: A
2. Driehoeksgolfgenerator - IC1: B
3. Spanningsvergelijkers - IC1: C en D
4. Motoraandrijving - Q3-6
Laten we beginnen met de fase van de motorstuurprogramma, gecentreerd rond MOSFET's Q3-6. Slechts een paar van deze MOSFET's blijven op elk moment in de geactiveerde toestand. Terwijl Q3 en Q6 AAN zijn, beweegt de stroom door de motor en zorgt ervoor dat deze in één richting draait.
Zodra Q4 en Q5 in bedrijfstoestand zijn, wordt de stroomcirculatie omgekeerd en begint de motor in tegengestelde richting te draaien. IC1: C en IC1: D bepalen welke MOSFET's worden ingeschakeld.
Opamps IC1: C en IC1: D zijn bedraad als spanningscomparatoren. De referentiespanning voor deze opamps wordt geproduceerd door de weerstandsspanningsdeler van R6, R7 en R8.
Merk op dat de referentiespanning voor IC1: D is aangesloten op de ‘+’ ingang, maar voor IC1: C is het gekoppeld aan de ‘-’ ingang.
Dit betekent dat IC1: D wordt geactiveerd met een spanning die hoger is dan de referentie, terwijl IC1: C wordt gevraagd met een spanning die lager is dan de referentie. Opamp IC1: B is geconfigureerd als driehoeksgolfgenerator en levert het activeringssignaal aan de relevante spanningscomparatoren.
De frequentie is ongeveer het omgekeerde van de tijdconstante van R5 en C1 - 270Hz voor de gebruikte waarden.
Verlaging van R5 of C1 verhoogt de frequentie en verhoogt elk van deze zal de frequentie verlagen. Het piek-tot-piek uitgangsniveau van de driehoekige golf is veel kleiner dan het verschil tussen de twee spanningsreferenties.
Het is daarom buitengewoon moeilijk om beide comparatoren tegelijkertijd te activeren. Of anders zouden alle 4 MOSFET's gaan geleiden, wat leidt tot kortsluiting en ze allemaal verpest.
De driehoekige golfvorm is opgebouwd rond een gelijkstroomverschuivingsspanning. Het verhogen of verlagen van de offsetspanning varieert de pulspositie van de driehoeksgolf op geschikte wijze.
Door de driehoeksgolf naar boven te schakelen, kan comparator IC1: D worden geactiveerd, terwijl de comparator IC1: C wordt geactiveerd. Als het spanningsniveau van de driehoekgolf in het midden van de twee spanningsreferenties ligt, wordt geen van de comparatoren geïnduceerd. De DC-offsetspanning wordt geregeld door de potentiometer P1 via IC1: A, die is uitgevoerd als een spanningsvolger.
Dit geeft een spanningsbron met een lage uitgangsimpedantie, waardoor de DC-offsetspanning minder kwetsbaar is voor de belasting van IC1: B.
Als de ‘pot’ wordt geschakeld, begint de DC-offset-spanning te variëren, omhoog of omlaag op basis van de richting waarin de pot wordt omgedraaid. Diode D3 biedt beveiliging tegen omgekeerde polariteit voor de controller.
Weerstand R15 en condensator C2 zijn een eenvoudig laagdoorlaatfilter. Dit is bedoeld om eventuele spanningspieken te verwijderen die worden veroorzaakt door de MOSFET's wanneer ze de stroomtoevoer naar de motor inschakelen.
Onderdelen lijst

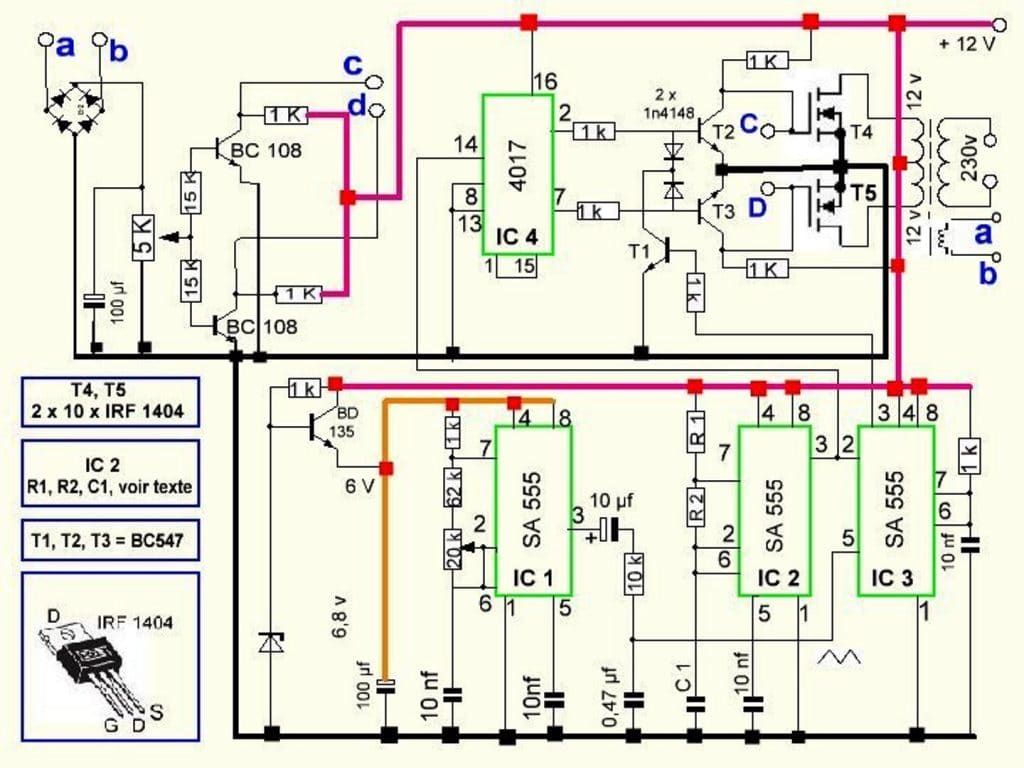
2) Bidirectionele motorbesturing met IC 556
De snelheids- en bidirectionele regeling voor DC-motoren is relatief eenvoudig te implementeren. Bij onafhankelijk bekrachtigde motoren is het toerental in principe een lineaire functie van de voedingsspanning. Motoren met een permanente magneet zijn een subcategorie van onafhankelijk bekrachtigde motoren en worden vaak gebruikt in speelgoed en modellen.
In dit circuit wordt de voedingsspanning van de motor gevarieerd door middel van pulsbreedtemodulatie (PWM), wat zorgt voor een goed rendement en een relatief hoog koppel bij lage motorsnelheden. Met een enkele stuurspanning tussen 0 en +10 V kan het motortoerental in beide richtingen worden omgekeerd en gevarieerd van nul tot maximaal.
Astable multivibrator IC is opgezet als een 80 Hz oscillator en bepaalt de frequentie van het PWM-signaal. Huidige bron T1 laadt Ca. De zaagtandspanning over deze condensator wordt vergeleken met de stuurspanning in 1C2, die het PWM-signaal naar de buffer N1-Na of NPN1 stuurt. De op Darlington gebaseerde motoraandrijving is een brugcircuit dat belastingen tot 4 Ampère kan aansturen, op voorwaarde dat de inloopstroom onder de 5 Ampère blijft en er voldoende koeling is voor de vermogenstransistors T1 -Ts. Diodes D1, D5 bieden bescherming tegen inductieve pieken van de motor. Schakelaar S1 maakt het mogelijk om de motor onmiddellijk te draaien.

Prototype afbeeldingen



Vorige: Versterkercircuits begrijpen Volgende: Transistors (BJT) en MOSFET verbinden met Arduino