In deze post gaan we een draadloos servomotorcircuit bouwen dat 6 servomotoren draadloos kan besturen via een 2,4 GHz communicatieverbinding.
Invoering
Het project is opgedeeld in twee delen: een zender met 6 potmeters en een ontvangerschakeling met 6 servomotoren
De afstandsbediening heeft 6 potentiometers om 6 afzonderlijke servomotoren onafhankelijk van de ontvanger te bedienen. Door aan de potentiometer te draaien, wordt de hoek van de servomotor kan worden gecontroleerd
Het voorgestelde circuit kan worden gebruikt waar u een gecontroleerde beweging nodig heeft, bijvoorbeeld de arm van een robot of de richting van de voorwielen van een RC-auto.
Het hart van het circuit is de NRF24L01-module, een zendontvanger die werkt op de ISM-band (industriële, wetenschappelijke en medische band). Het is dezelfde frequentieband als uw wifi-verbinding.
Illustratie van NRF24L01-modules:

Het heeft 125 kanalen, het heeft een maximale gegevenssnelheid van 2 MBps en het theoretische maximale bereik van 100 meter. U heeft twee van dergelijke modules nodig om een communicatieverbinding tot stand te brengen.
Pin configuratie:

Het werkt op het SPI-communicatieprotocol. U moet 7 van de 8 pinnen op Arduino aansluiten om deze module te laten werken.
Het werkt op 3,3 V en 5V doodt de module, dus wees voorzichtig tijdens het voeden. Gelukkig hebben we een 3.3V-spanningsregelaar op Arduino aan boord en deze moet alleen worden gevoed via een 3.3V-aansluiting van Arduino.
Laten we nu verder gaan met het zendcircuit.
Zender Circuit:

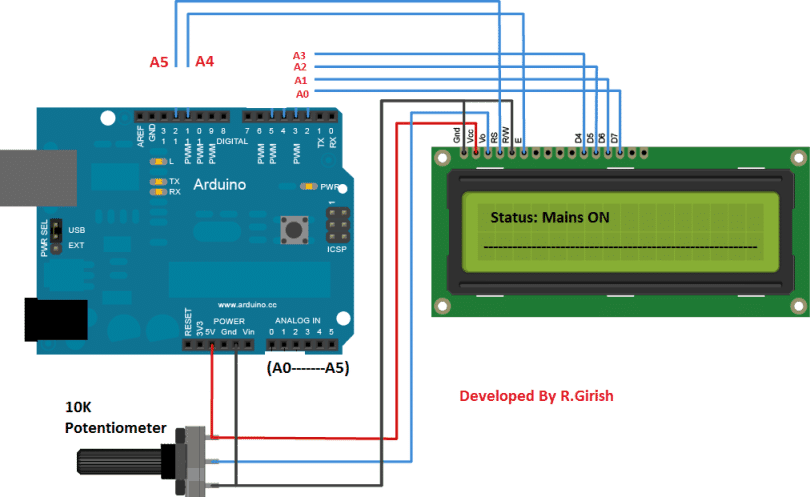
Het circuit bestaat uit 6 potentiometers met een waarde van 10K ohm. De middelste aansluiting van 6 potentiometers is verbonden met A0 tot A5 analoge ingangspinnen.
Tabellering wordt gegeven naast het schema voor NRF24L01 naar Arduino-verbinding die u kunt raadplegen, als u enige verwarring hebt in het schakelschema.
Dit circuit kan worden gevoed door een USB- of 9V-batterij via een DC-aansluiting.
Download het bibliotheekbestand hier: github.com/nRF24/
Programma voor zender:
Dat concludeert de zender.
De ontvanger:

Het ontvangercircuit bestaat uit 6 servomotoren, een Arduino en twee aparte voedingen.
De servomotoren hebben een hogere stroom nodig om te werken, dus het mag niet worden gevoed door arduino Daarom hebben we twee aparte stroombronnen nodig.
Gelieve de juiste spanning op de servo aan te brengen voor micro-servomotoren. 4.8V is voldoende, als u grotere servomotoren van stroom wilt voorzien, past u spanning toe op de classificatie van de servo.
Houd er rekening mee dat de servomotor wat stroom verbruikt, zelfs als er geen moment is, dat komt omdat de arm van de servomotor altijd vecht tegen elke verandering van zijn becommentarieerde positie.
Programma voor ontvanger:
Dat concludeert de ontvanger.
Hoe dit project te bedienen:
• Voorzie beide circuits van stroom.
• Draai nu aan een van de potentiometerknoppen.
• Bijvoorbeeld 3e potentiometer, de bijbehorende servo op de ontvanger draait.
• Dit geldt voor alle servomotoren en potentiometers.
Opmerking: U kunt de zender op de computer aansluiten en de seriële monitor openen om de gegevens te zien zoals de hoek van de servomotor, het spanningsniveau op de analoge pin en welke potentiometer momenteel wordt bediend.
Als je een specifieke vraag hebt over dit op Arduino gebaseerde draadloze servomotorproject, geef dan in het commentaargedeelte aan dat je snel een reactie kunt krijgen.
Vorige: 200, 600 LED String Circuit op netspanning 220V Volgende: Hoge stroom sensorloze BLDC-motorcontroller met behulp van back-EMF