
Zoals de naam al doet vermoeden, gaat dit artikel een precies idee geven over de structuur en werking van de PID-regelaar. Laten we echter in detail treden en een inleiding krijgen over PID-regelaars. PID-regelaars zijn te vinden in een breed scala aan toepassingen voor industriële procesregeling. Ongeveer 95% van de closed-loop operaties van de industriële automatie sector gebruiken PID-regelaars. PID staat voor Proportional-Integral-Derivative. Deze drie controllers zijn zo gecombineerd dat ze een stuursignaal produceren. Als feedbackcontroller levert het de stuuruitgang op de gewenste niveaus. Voordat microprocessors werden uitgevonden, werd PID-regeling geïmplementeerd door de analoge elektronische componenten. Maar tegenwoordig worden alle PID-controllers verwerkt door de microprocessors. Programmeerbare logische controllers hebben ook de ingebouwde PID-controller instructies. Vanwege de flexibiliteit en betrouwbaarheid van de PID-regelaars worden deze traditioneel gebruikt in procesbesturingstoepassingen.
Wat is een PID-regelaar?
De term PID staat voor proportionele integrale afgeleide en het is een soort apparaat dat wordt gebruikt om verschillende procesvariabelen zoals druk, stroom, temperatuur en snelheid in industriële toepassingen te regelen. In deze controller wordt een feedback-apparaat van de regelkring gebruikt om alle procesvariabelen te regelen.
Dit type besturing wordt gebruikt om een systeem aan te drijven in de richting van een objectieve locatie die anders waterpas is. Het is bijna overal voor temperatuurregeling en wordt gebruikt in wetenschappelijke processen, automatisering en talloze chemicaliën. In deze controller wordt terugkoppeling met terugkoppeling gebruikt om de werkelijke output van een methode dicht bij het doel te houden, anders output indien mogelijk op het vaste punt. In dit artikel wordt het ontwerp van de PID-controller met daarin gebruikte regelmodi zoals P, I & D besproken.
Geschiedenis
De geschiedenis van de PID-controller is, In het jaar 1911 werd de eerste PID-controller ontwikkeld door Elmer Sperry. Daarna werd TIC (Taylor Instrumental Company) geïmplementeerd in een voormalige pneumatische controller met volledig tunable in het jaar 1933. Na een paar jaar verwijderden regeltechnici de fout van de steady-state die wordt aangetroffen bij proportionele regelaars door het einde opnieuw af te stemmen op een valse waarde totdat de fout niet nul was.
Deze nieuwe afstemming omvatte de fout die bekend staat als de proportioneel-integrale controller. Daarna, in het jaar 1940, werd de eerste pneumatische PID-regelaar ontwikkeld via een afgeleide actie om doorschietproblemen te verminderen.
In 1942 hebben Ziegler & Nichols afstemmingsregels ingevoerd om de geschikte parameters van PID-regelaars door de ingenieurs te ontdekken en in te stellen. Eindelijk werden automatische PID-regelaars halverwege 1950 op grote schaal gebruikt in industrieën.
Blokschema PID-controller
Een gesloten-lussysteem zoals een PID-regelaar bevat een feedbackregelsysteem. Dit systeem evalueert de terugkoppelingsvariabele met behulp van een vast punt om een foutsignaal te genereren. Op basis daarvan verandert het de systeemoutput. Deze procedure gaat door totdat de fout nul bereikt, anders wordt de waarde van de feedbackvariabele gelijk aan een vast punt.
Deze controller geeft goede resultaten in vergelijking met de AAN / UIT-type controller. In de AAN / UIT-type controller zijn er eenvoudig twee voorwaarden beschikbaar om het systeem te beheren. Zodra de proceswaarde lager is dan het vaste punt, wordt deze ingeschakeld. Op dezelfde manier wordt het uitgeschakeld zodra de waarde hoger is dan een vaste waarde. De output is niet stabiel in dit soort controller en zal regelmatig slingeren in de buurt van het vaste punt. Deze controller is echter stabieler en nauwkeuriger in vergelijking met de AAN / UIT-type controller.

Werking van PID-regelaar
Werking van PID-regelaar
Met het gebruik van een goedkope, eenvoudige AAN-UIT-controller, zijn slechts twee regeltoestanden mogelijk, zoals volledig AAN of volledig UIT. Het wordt gebruikt voor een beperkte besturingstoepassing waar deze twee besturingstoestanden voldoende zijn voor het besturingsdoel. De oscillerende aard van deze regeling beperkt het gebruik ervan en daarom wordt deze vervangen door PID-regelaars.
PID-regelaar handhaaft de output zodanig dat er een nulfout is tussen de procesvariabele en het instelpunt / gewenste output door closed-loop operaties. PID gebruikt drie basisregelgedragingen die hieronder worden uitgelegd.
P- Controller
Proportionele of P-regelaar geeft een output die evenredig is met de huidige fout e (t). Het vergelijkt het gewenste of instelpunt met de werkelijke waarde of terugkoppelingsproceswaarde. De resulterende fout wordt vermenigvuldigd met een proportionele constante om de uitvoer te krijgen. Als de foutwaarde nul is, is deze controlleruitgang nul.

P-regelaar
Deze controller vereist voorspanning of handmatige reset wanneer deze alleen wordt gebruikt. Dit komt omdat het nooit de stabiele toestand bereikt. Het biedt een stabiele werking, maar handhaaft altijd de stationaire fout. De snelheid van de reactie wordt verhoogd wanneer de proportionele constante Kc toeneemt.

P-controller reactie
Ik-controller
Vanwege de beperking van de p-controller, waar er altijd een offset bestaat tussen de procesvariabele en het instelpunt, is een I-controller nodig, die de nodige actie biedt om de steady-state-fout te elimineren. Het integreert de fout gedurende een bepaalde periode totdat de foutwaarde nul bereikt. Het bevat de waarde voor het laatste besturingsapparaat waarbij de fout nul wordt.

PI-regelaar
Integrale controle verlaagt zijn output wanneer er een negatieve fout optreedt. Het beperkt de reactiesnelheid en beïnvloedt de stabiliteit van het systeem. De snelheid van de reactie wordt verhoogd door de integrale versterking, Ki, te verlagen.

Reactie PI-regelaar
In de bovenstaande afbeelding, naarmate de versterking van de I-controller afneemt, neemt ook de steady-state-fout af. In de meeste gevallen wordt de PI-regelaar vooral gebruikt waar de snelle respons niet vereist is.
Bij gebruik van de PI-controller is de uitvoer van de I-controller beperkt tot een enigszins bereik om de integraal opwinden omstandigheden waarbij de integrale output blijft toenemen, zelfs bij een fouttoestand nul, vanwege niet-lineariteiten in de installatie.
D-controller
De I-controller heeft niet de mogelijkheid om het toekomstige gedrag van fouten te voorspellen. Het reageert dus normaal zodra het instelpunt is gewijzigd. D-controller lost dit probleem op door te anticiperen op het toekomstige gedrag van de fout. De output is afhankelijk van de snelheid waarmee de fout in de tijd verandert, vermenigvuldigd met de afgeleide constante. Het geeft de kickstart voor de output, waardoor de systeemrespons toeneemt.

PID-regelaar
In de bovenstaande figuur is de reactie van D, de controller meer, vergeleken met de PI-controller, en ook de insteltijd van de output wordt verkort. Het verbetert de stabiliteit van het systeem door de fasevertraging veroorzaakt door de I-controller te compenseren. Door de afgeleide versterking te verhogen, neemt de reactiesnelheid toe.

Reactie PID-regelaar
Dus uiteindelijk hebben we vastgesteld dat we door deze drie controllers te combineren de gewenste respons voor het systeem kunnen krijgen. Verschillende fabrikanten ontwerpen verschillende PID-algoritmen.
Soorten PID-regelaars
PID-regelaars zijn ingedeeld in drie typen, zoals AAN / UIT, proportionele en standaard type regelaars. Deze controllers worden gebruikt op basis van het besturingssysteem, de gebruiker kan de controller gebruiken om de methode te regelen.
AAN / UIT-regeling
Een aan-uit-regelmethode is het eenvoudigste type apparaat dat wordt gebruikt voor temperatuurregeling. De uitvoer van het apparaat kan AAN / UIT zijn via geen middenstatus. Deze controller zet de uitgang gewoon AAN zodra de temperatuur het vaste punt overschrijdt. Een limietcontroller is een bepaald soort AAN / UIT-controller die een vergrendelingsrelais gebruikt. Dit relais wordt handmatig gereset en gebruikt om een methode uit te schakelen zodra een bepaalde temperatuur is bereikt.
Proportionele controle
Dit soort controller is ontworpen om de cycli te verwijderen die is aangesloten via AAN / UIT-bediening. Deze PID-regelaar vermindert het normale vermogen dat naar de verwarming wordt gestuurd zodra de temperatuur het vaste punt bereikt.
Deze controller heeft één functie om de verwarmer te regelen, zodat deze het vaste punt niet overschrijdt, maar het vaste punt bereikt om een constante temperatuur te behouden.
Deze proportionele handeling kan worden bereikt door de uitgang gedurende korte perioden AAN en UIT te schakelen. Deze tijdsafstemming verandert de verhouding van AAN-tijd naar UIT-tijd voor het regelen van de temperatuur.
Standaard type PID-regelaar
Dit soort PID-regelaar voegt proportionele regeling samen via integrale en afgeleide regeling om de unit automatisch te helpen bij het compenseren van wijzigingen in het systeem. Deze modificaties, integraal en afgeleid, worden uitgedrukt in op tijd gebaseerde eenheden.
Deze controllers worden ook verwezen via hun reciprocals, RATE & RESET dienovereenkomstig. De voorwaarden van PID moeten afzonderlijk worden aangepast, anders worden afgestemd op een specifiek systeem met zowel de proef als de fout. Deze controllers bieden de meest nauwkeurige en stabiele controle van de 3 soorten controllers.
Realtime PID-regelaars
Momenteel zijn er verschillende soorten PID-regelaars op de markt. Deze regelaars worden gebruikt voor industriële regelvereisten zoals druk, temperatuur, niveau en debiet. Zodra deze parameters via PID worden bestuurd, kunt u kiezen uit het gebruik van een afzonderlijke PID-controller of een PLC.
Deze afzonderlijke controllers worden overal gebruikt waar anders twee lussen moeten worden gecontroleerd en anderszins gecontroleerd in de omstandigheden waar het complex is aan de rechterkant van toegang via grotere systemen.
Deze bedieningsapparaten bieden verschillende keuzes voor solo- en twin loop-bediening. De zelfstandige PID-controllers bieden verschillende configuraties met een vast punt om de verschillende autonome alarmen te produceren.
Deze zelfstandige regelaars bestaan voornamelijk uit PID-regelaars van Honeywell, temperatuurregelaars van Yokogawa, autotune-regelaars van OMEGA, Siemens en ABB-regelaars.
PLC's worden gebruikt als PID-regelaars in de meeste industriële besturingstoepassingen. De opstelling van PID-blokken kan worden gedaan binnen PAC's of PLC's om superieure keuzes te bieden voor een exacte PLC-besturing. Deze controllers zijn slimmer en krachtiger in vergelijking met afzonderlijke controllers. Elke PLC bevat het PID-blok binnen de softwareprogrammering.
Afstemmingsmethoden
Voordat de werking van de PID-regelaar plaatsvindt, moet deze worden afgestemd op de dynamiek van het te regelen proces. Ontwerpers geven de standaardwaarden voor P-, I- en D-termen, en deze waarden konden niet de gewenste prestatie geven en leiden soms tot instabiliteit en trage besturingsprestaties. Er zijn verschillende soorten afstemmethoden ontwikkeld om de PID-regelaars af te stemmen en vereisen veel aandacht van de operator om de beste waarden van proportionele, integrale en afgeleide versterkingen te selecteren. Enkele hiervan worden hieronder gegeven.
PID-controllers worden in de meeste industriële toepassingen gebruikt, maar men moet de instellingen van deze controller kennen om deze correct aan te passen om de gewenste output te genereren. Hier is afstemming niets anders dan de procedure om een ideaal antwoord van de controller te ontvangen door de beste proportionele versterkingen, integrale en afgeleide factoren in te stellen.
De gewenste output van de PID-regelaar kan worden verkregen door de regelaar af te stemmen. Er zijn verschillende technieken beschikbaar om de vereiste output van de controller te krijgen, zoals trial & error, Zeigler-Nichols & procesreactiecurve. De meest gebruikte methoden zijn vallen en opstaan, Zeigler-Nichols, etc.
Methode van vallen en opstaan: Het is een eenvoudige methode om de PID-regelaar af te stemmen. Terwijl het systeem of de controller werkt, kunnen we de controller afstemmen. Bij deze methode moeten we eerst de Ki- en Kd-waarden op nul zetten en de proportionele term (Kp) verhogen totdat het systeem oscillerend gedrag bereikt. Als het eenmaal oscilleert, past u Ki (integrale term) aan zodat oscillaties stoppen en pas uiteindelijk D aan om een snelle respons te krijgen.
Procesreactie Curve Techniek: Het is een afstemmingstechniek met een open lus. Het produceert een reactie wanneer een stapinvoer op het systeem wordt toegepast. In eerste instantie moeten we wat besturingsoutput handmatig op het systeem toepassen en de responscurve registreren.
Daarna moeten we de helling, dode tijd, de stijgtijd van de curve berekenen en deze waarden uiteindelijk vervangen in P-, I- en D-vergelijkingen om de versterkingswaarden van PID-termen te krijgen.

Proces reactie curve
Zeigler-Nichols-methode: Zeigler-Nichols stelde closed-loop-methoden voor voor het afstemmen van de PID-regelaar. Dat zijn de continue cyclische methode en de gedempte oscillatiemethode. De procedures voor beide methoden zijn hetzelfde, maar het oscillatiegedrag is anders. Hierin moeten we eerst de p-controllerconstante, Kp, op een bepaalde waarde instellen, terwijl de waarden Ki en Kd nul zijn. De proportionele versterking wordt verhoogd totdat het systeem met een constante amplitude oscilleert.
Versterking waarbij het systeem constante oscillaties produceert, wordt ultieme versterking (Ku) genoemd en de periode van oscillaties wordt de ultieme periode (Pc) genoemd. Zodra deze is bereikt, kunnen we de waarden van P, I en D invoeren in de PID-controller volgens de tabel van Zeigler-Nichols, afhankelijk van de gebruikte controller zoals P, PI of PID, zoals hieronder weergegeven.

Zeigler-Nichols tafel
PID-regelaarstructuur
PID-regelaar bestaat uit drie termen, namelijk proportionele, integrale en afgeleide regeling. De gecombineerde werking van deze drie controllers geeft een controlestrategie voor procesregeling. De PID-regelaar manipuleert de procesvariabelen zoals druk, snelheid, temperatuur, debiet, enz. Sommige toepassingen gebruiken PID-regelaars in cascademetwerken waar twee of meer PID's worden gebruikt om controle te verkrijgen.

Structuur van PID-regelaar
De bovenstaande afbeelding toont de structuur van de PID-regelaar. Het bestaat uit een PID-blok dat zijn output aan het procesblok geeft. Proces / fabriek bestaat uit laatste besturingsapparatuur zoals actuatoren, regelkleppen en andere besturingsapparatuur om verschillende processen van de industrie / fabriek te besturen.
Een feedbacksignaal van de procesinstallatie wordt vergeleken met een instelpunt of referentiesignaal u (t) en het bijbehorende foutsignaal e (t) wordt naar het PID-algoritme gestuurd. Volgens de proportionele, integrale en afgeleide besturingsberekeningen in het algoritme, produceert de controller een gecombineerde respons of gecontroleerde output die wordt toegepast op plantbesturingsinrichtingen.
Alle besturingsapplicaties hebben niet alle drie de besturingselementen nodig. Combinaties zoals PI- en PD-besturingen worden heel vaak gebruikt in praktische toepassingen.
Toepassingen
De PID-regeltoepassingen omvatten de volgende.
De beste PID-regeltoepassing is temperatuurregeling waarbij de controller een ingang van een temperatuursensor gebruikt en de uitgang kan worden gekoppeld aan een bedieningselement zoals een ventilator of verwarming. Over het algemeen is deze controller slechts één element in een temperatuurregelsysteem. Het hele systeem moet worden onderzocht en overwogen bij het kiezen van de juiste controller.
Temperatuurregeling van oven
Over het algemeen worden ovens gebruikt om te verwarmen en om een enorme hoeveelheid grondstof bij hoge temperaturen vast te houden. Het is gebruikelijk dat het gebruikte materiaal een enorme massa bevat. Dientengevolge vergt het een grote hoeveelheid traagheid en verandert de temperatuur van het materiaal niet snel, zelfs niet wanneer er enorme hitte wordt toegepast. Deze functie resulteert in een redelijk stabiel PV-signaal en stelt de afgeleide periode in staat om efficiënt fouten te corrigeren zonder extreme veranderingen aan de FCE of de CO.
MPPT-laadregelaar
De V-I-karakteristiek van een fotovoltaïsche cel hangt voornamelijk af van het temperatuurbereik en de bestralingssterkte. Op basis van de weersomstandigheden zullen de stroom- en bedrijfsspanning constant veranderen. Het is dus buitengewoon belangrijk om de hoogste PowerPoint van een efficiënt fotovoltaïsch systeem te volgen. De PID-regelaar wordt gebruikt om MPPT te vinden door vaste spannings- en stroompunten aan de PID-regelaar te geven. Zodra de weersomstandigheden zijn veranderd, houdt de tracker stroom en spanning stabiel.
De converter van vermogenselektronica
We weten dat de omzetter een toepassing is van vermogenselektronica, dus een PID-regelaar wordt meestal gebruikt in omvormers. Telkens wanneer een omzetter via een systeem wordt verbonden op basis van de verandering binnen de belasting, wordt de uitvoer van de omzetter gewijzigd. Een omvormer is bijvoorbeeld verbonden met belasting, de enorme stroom wordt geleverd zodra de belasting wordt verhoogd. De parameter van zowel spanning als stroom is dus niet stabiel, maar zal veranderen op basis van de vereiste.
In deze toestand genereert deze controller PWM-signalen om de IGBT's van de omvormer te activeren. Op basis van de verandering in de belasting wordt het reactiesignaal aan de PID-regelaar geleverd, zodat deze n fout veroorzaakt. Deze signalen worden gegenereerd op basis van het foutsignaal. In deze toestand kunnen we veranderlijke invoer en uitvoer verkrijgen via een vergelijkbare omvormer.
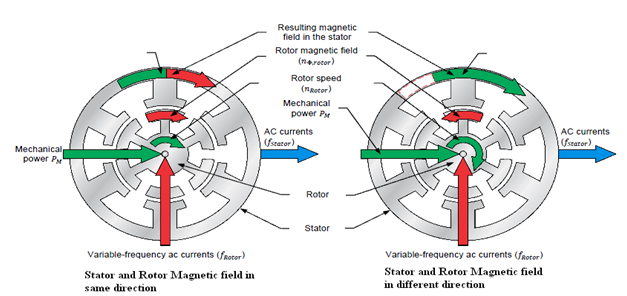
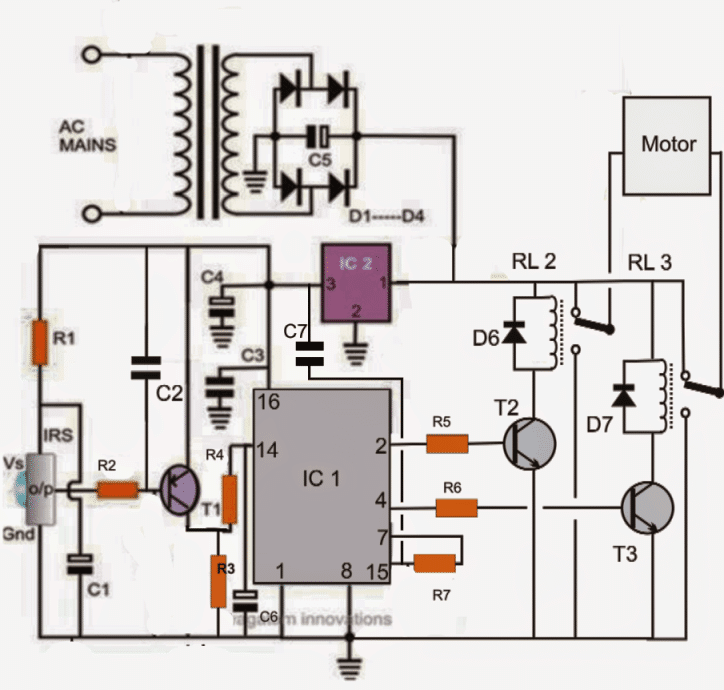
Toepassing van PID-controller: Closed Loop Control voor een borstelloze DC-motor
PID-controller-interface
Het ontwerp en de interface van de PID-controller kan worden gedaan met behulp van de Arduino-microcontroller. In het laboratorium is de op Arduino gebaseerde PID-controller ontworpen met behulp van het Arduino UNO-bord, elektronische componenten, thermo-elektrische koeler, terwijl de softwareprogrammeertalen die in dit systeem worden gebruikt C of C ++ zijn. Dit systeem wordt gebruikt om de temperatuur binnen het laboratorium te regelen.
De parameters van PID voor een specifieke controller worden fysiek gevonden. De functie van verschillende PID-parameters kan worden geïmplementeerd door het daaropvolgende contrast tussen verschillende vormen van controllers.
Dit interfacing-systeem kan de temperatuur efficiënt berekenen door een fout van ± 0,6 ℃, terwijl een constante temperatuur wordt geregeld door simpelweg een klein verschil met de voorkeurswaarde te bereiken. De concepten die in dit systeem worden gebruikt, bieden zowel goedkope als exacte technieken om fysieke parameters in een geprefereerd bereik binnen het laboratorium te beheren.
Dit artikel bespreekt dus een overzicht van de PID-regelaar met geschiedenis, blokdiagram, structuur, typen, werking, afstemmingsmethoden, interfacing, voordelen en toepassingen. We hopen dat we elementaire maar nauwkeurige kennis over PID-regelaars hebben kunnen verschaffen. Hier is een simpele vraag voor jullie allemaal. Welke van de verschillende afstemmingsmethoden wordt bij voorkeur gebruikt om een optimale werking van de PID-regelaar te bereiken en waarom?
U wordt vriendelijk verzocht uw antwoorden te geven in het commentaargedeelte hieronder.
Fotocredits
PID-controller blokschema door wikimedia
PID-controller structuur, P-controller, P - controller respons & PID-controller door blog.opticontrols
P - controller reactie door controls.engin.umich
PI-controller reactie door m.eet
Reactie PID-regelaar door wikimedia
Zeigler-Nichols tafel van controls.engin








{kind=link}
{kind=link}
{kind=link}
{kind=link}