In dit artikel zullen we proberen te begrijpen hoe scalair besturingsalgoritme wordt geïmplementeerd voor het regelen van de inductiemotorsnelheid met relatief eenvoudige berekeningen, en toch een redelijk goede lineair variabele snelheidsregeling van de motor bereiken.

Rapporten van vele topmarktanalyses laten dat zien inductiemotoren zijn het populairst als het gaat om het hanteren van zware industriële motortoepassingen en banen. De belangrijkste redenen voor de populariteit van inductiemotoren zijn voornamelijk te wijten aan de hoge mate van robuustheid, grotere betrouwbaarheid in termen van slijtage en relatief hoge functionele efficiëntie.
Dat gezegd hebbende, hebben inductiemotoren een typisch nadeel, omdat deze niet eenvoudig te besturen zijn met gewone conventionele methoden. Het aansturen van inductiemotoren is relatief veeleisend vanwege de nogal complexe wiskundige configuratie, die voornamelijk bestaat uit:
- Niet-lineaire respons bij kernverzadiging
- Instabiliteit in de vormoscillaties als gevolg van variërende temperatuur van de wikkeling.
Vanwege deze kritische aspecten vereist het implementeren van inductiemotorbesturing optimaal een grondig berekend algoritme met hoge betrouwbaarheid, bijvoorbeeld met behulp van een 'vectorbesturing' -methode, en bovendien met behulp van een op microcontroller gebaseerd verwerkingssysteem.
Inzicht in de implementatie van scalaire besturing
Er bestaat echter nog een andere methode die kan worden toegepast voor het implementeren van inductiemotorbesturing met behulp van een veel eenvoudigere configuratie, het is de scalaire besturing die niet-vectoraandrijvingstechnieken bevat.
Het is eigenlijk mogelijk om een AC-inductiemotor in een stabiele toestand te brengen door hem te laten werken met een eenvoudige spanningsfeedback en stroomgestuurde systemen.
Bij deze scalaire methode kan de scalaire variabele worden aangepast zodra de juiste waarde is bereikt, hetzij door praktisch te experimenteren, hetzij door middel van geschikte formules en berekeningen.
Vervolgens kan deze meting worden gebruikt voor het implementeren van motorbesturing via een open circuit of via een topologie met gesloten terugkoppeling.
Hoewel de scalaire controlemethode een redelijk goede steady-state-resultaten op de motor belooft, is de tijdelijke respons mogelijk niet voldoende.
Hoe inductiemotoren werken
Het woord 'inductie' in inductiemotoren verwijst naar de unieke manier van werken, waarbij het magnetiseren van de rotor door de statorwikkeling een cruciaal aspect van de werking wordt.
Wanneer AC wordt aangelegd over de statorwikkeling, werkt het oscillerende magnetische veld van de statorwikkeling samen met het rotoranker, waardoor een nieuw magnetisch veld op de rotor ontstaat, dat op zijn beurt reageert met het magnetische veld van de stator, waardoor een hoog draaimoment op de rotor wordt opgewekt. . Dit rotatiekoppel geeft de vereiste effectieve mechanische output aan de machine.
Wat is een driefasige inductiemotor voor eekhoornkooien
Het is de meest populaire variant van inductiemotoren en wordt veelvuldig gebruikt in industriële toepassingen. In een inductiemotor voor een eekhoornkooi draagt de rotor een reeks staafvormige geleiders die de as van de rotor omringen en een unieke kooiachtige structuur presenteren en vandaar de naam 'eekhoornkooi'.
Deze staven die scheef van vorm zijn en rondom de rotoras lopen, zijn bevestigd met dikke en stevige metalen ringen aan de uiteinden van de staven. Deze metalen ringen helpen niet alleen om de staven stevig op hun plaats te houden, maar zorgen ook voor een essentiële elektrische kortsluiting over de staven.
Wanneer de statorwikkeling wordt toegepast met een opeenvolgende driefasige sinusvormige wisselstroom, begint het resulterende magnetische veld ook te bewegen met dezelfde snelheid als de driefasige sinusfrequentie van de stator (ωs).
Aangezien het rotorsamenstel van de eekhoornkooi binnen de statorwikkeling wordt vastgehouden, reageert het bovengenoemde wisselende 3-fasen magnetische veld van de statorwikkeling waarbij het rotorsamenstel een equivalent magnetisch veld induceert op de staafgeleiders van het kooisamenstel.
Dit dwingt een secundair magnetisch veld om zich op te bouwen rond de rotorstaven, en dientengevolge wordt dit nieuwe magnetische veld gedwongen om in wisselwerking te treden met het statorveld, waardoor een rotatiekoppel wordt opgelegd aan de rotor die de richting van het magnetische statorveld probeert te volgen.

In het proces probeert de rotorsnelheid de frequentiesnelheid van de stator te bereiken, en naarmate het de synchrone magnetische veldsnelheid van de stator nadert, begint het relatieve snelheidsverschil e tussen de statorfrequentiesnelheid en de rotatiesnelheid van de rotor af te nemen, wat een afname van het magnetische veld veroorzaakt. interactie van het magnetische veld van de rotor over het magnetische veld van de stator, waardoor uiteindelijk het koppel op de rotor en het equivalente vermogen van de rotor afneemt.
Dit leidt tot een minimaal vermogen op de rotor en bij deze snelheid zou de rotor een stabiele toestand hebben verworven, waarbij de belasting op de rotor gelijk is en overeenkomt met het koppel op de rotor.
De werking van een inductiemotor in reactie op een belasting kan worden samengevat zoals hieronder wordt uitgelegd:
Aangezien het verplicht wordt om een fijn verschil te handhaven tussen de rotorsnelheid (as) en de frequentiesnelheid van de binnenste stator, roteert de rotorsnelheid die de belasting daadwerkelijk afhandelt met een iets lagere snelheid dan de statorfrequentiesnelheid. Omgekeerd, als we veronderstellen dat de stator wordt toegepast met 50Hz 3-fasenvoeding, dan zal de hoeksnelheid van deze 50Hz-frequentie over de statorwikkeling altijd iets hoger zijn dan de respons in de rotatiesnelheid van de rotor, dit wordt inherent gehandhaafd om een optimale macht op de rotor.
Wat is slip in inductiemotor
Het relatieve verschil tussen de hoekfrequentie van de stator en de responsieve rotatiesnelheid van de rotor wordt de 'slip' genoemd. De slip moet aanwezig zijn, zelfs in situaties waarin de motor wordt bediend met een veldgerichte strategie.
Omdat de rotoras in inductiemotoren voor zijn rotatie niet afhankelijk is van externe excitatie, kan hij werken zonder conventionele sleepringen of borstels, waardoor vrijwel geen slijtage, hoge efficiëntie en toch goedkoop in onderhoud is.
De koppelfactor in deze motoren wordt bepaald door de hoek tussen de magnetische fluxen van de stator en de rotor.
Als we naar het onderstaande diagram kijken, kunnen we zien dat de snelheid van de rotor is toegewezen als Ω, en dat de frequenties over de stator en de rotor worden bepaald door de parameter 's' of de slip, weergegeven met de formule:
s = ( ω s ω r ω s
In de bovenstaande uitdrukking is s de 'slip' die het verschil vertoont tussen de synchrone frequentiesnelheid van de stator en het werkelijke motortoerental ontwikkeld op de rotoras.

Inzicht in de scalaire snelheidsregelingstheorie
In inductiemotorbesturingsconcepten waar Technische V / Hz wordt gebruikt, wordt de snelheidsregeling geïmplementeerd door de statorspanning ten opzichte van de frequentie zodanig aan te passen dat de luchtspleetflux nooit kan afwijken buiten het verwachte bereik van de stationaire toestand, met andere woorden, het wordt gehandhaafd binnen deze geschatte stationaire toestand waarde, en daarom wordt het ook wel de scalaire controle methode aangezien de techniek sterk afhankelijk is van de stationaire dynamica voor het regelen van het motortoerental.
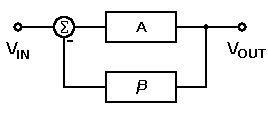
We kunnen de werking van dit concept begrijpen door te verwijzen naar de volgende afbeelding, die het vereenvoudigde schema van een scalaire besturingstechniek laat zien. In de opstelling wordt aangenomen dat de statorweerstand (Rs) nul is, terwijl de statorlekkage Inductantie (LI's) op de rotorlekkage en magnetiserende inductantie (LIr) drukt. De (LIr) die feitelijk de grootte van de luchtspleetflux weergeeft, kan worden gezien als geduwd voorafgaand aan de totale lekinductantie (Ll = Lls + Llr).

Hierdoor krijgt de luchtspleetflux die wordt gecreëerd door de magnetiserende stroom een geschatte waarde die dicht bij de frequentieverhouding van de stator ligt. De fasorexpressie voor een steady-state-beoordeling kan dus als volgt worden geschreven:

Voor inductiemotoren die mogelijk in hun lineaire magnetische gebieden draaien, zal de Lm niet veranderen en constant blijven, in dergelijke gevallen kan de bovenstaande vergelijking worden uitgedrukt als:

Waar V en Λ respectievelijk de statorspanningswaarden en statorflux zijn, terwijl Ṽ de phasorparameter in het ontwerp vertegenwoordigt.
De laatste uitdrukking hierboven legt duidelijk uit dat zolang de V / f-verhouding constant wordt gehouden, ongeacht enige verandering in de ingangsfrequentie (f), de flux ook constant blijft, waardoor de toque kan werken zonder afhankelijk te zijn van de voedingsspanningsfrequentie . Dat betekent dat als ΔM op een constant niveau wordt gehouden, de Vs / ƒ-verhouding ook met een constante relevante snelheid wordt weergegeven. Daarom zal telkens wanneer het toerental van de motor wordt verhoogd, de spanning over de statorwikkeling evenredig moeten worden verhoogd, zodat een constante Vs / f kan worden gehandhaafd.
Maar hier is de slip de functie van de belasting die aan de motor is gekoppeld, de synchrone frequentiesnelheid geeft niet de werkelijke snelheid van de motor weer.
Bij afwezigheid van een belastingskoppel op de rotor kan de resulterende slip verwaarloosbaar klein zijn, waardoor de motor bijna synchrone snelheden kan bereiken.
Dat is de reden waarom een basis Vs / f- of een V / Hz-configuratie meestal niet de mogelijkheid heeft om nauwkeurige snelheidsregeling van een inductiemotor te implementeren wanneer de motor is bevestigd met een belastingskoppel. Een slipcompensatie kan echter vrij gemakkelijk in het systeem worden geïntroduceerd samen met snelheidsmeting.
De onderstaande grafische weergave geeft duidelijk een snelheidssensor weer binnen een gesloten V / Hz-systeem.

In praktische implementaties kan de verhouding tussen statorspanning en frequentie meestal afhankelijk zijn van de beoordeling van deze parameters zelf.
Analyse van V / Hz-snelheidsregeling
Een standaard V / Hz-analyse is te zien in de volgende afbeelding.

In wezen vindt u 3 snelheidskeuzebereiken binnen een V / Hz-profiel, die kunnen worden begrepen op basis van de volgende punten:
- Verwijzend naar figuur 4 wanneer de afsnijfrequentie in het gebied 0-fc ligt, wordt een spanningsingang essentieel, die een potentiële daling over de statorwikkeling ontwikkelt, en deze spanningsval kan niet worden genegeerd en moet worden gecompenseerd door de voedingsspanning Vs. te verhogen. Dit geeft aan dat in dit gebied het V / Hz-verhoudingsprofiel geen lineaire functie is. We kunnen de afsnijfrequentie fc analytisch evalueren voor geschikte statorspanningen met behulp van het stationaire equivalentcircuit met Rs ≠ 0.
- In regio fc-r (nominaal) Hz, is het in staat om een constante Vs / Hz-relatie uit te voeren, in dit geval geeft de helling van de relatie de hoeveelheid van de luchtspleetflux
- In het gebied voorbij f (nominaal), bij hogere frequenties, wordt het onmogelijk om de Vs / f-verhouding met constante snelheid uit te voeren, aangezien in deze positie de statorspanning de neiging heeft om beperkt te worden tot de f (nominale) waarde. Dit gebeurt om ervoor te zorgen dat de statorwikkeling niet onderhevig is aan isolatie-defecten. Vanwege deze situatie heeft de resulterende luchtspleetflux de neiging om gecompromitteerd en verminderd te worden, wat leidt tot een overeenkomstig afnemend rotorkoppel. Deze operationele fase in inductiemotoren wordt de 'Fieldweakening region' Om dit soort situaties te voorkomen, wordt in deze frequentiebereiken meestal niet voldaan aan een constante V / Hz-regel.
Door de aanwezigheid van een constante statormagnetische flux ongeacht de frequentieverandering in de staorwikkeling, hoeft het toque op de rotor nu alleen te vertrouwen op de slipsnelheid, dit effect is te zien in de figuur 5 bovenstaand
Met de juiste slip-snelheidsregeling kan de snelheid van een inductiemotor effectief worden geregeld, samen met het koppel op de rotorbelasting door een constant V / Hz-principe toe te passen.
Dus of het nu gaat om een open of gesloten snelheidsregeling, beide kunnen worden geïmplementeerd met behulp van de constante V / Hz-regel.
Een open-loop-besturingsmodus zou kunnen worden gebruikt in toepassingen waar de nauwkeurigheid van de snelheidsregeling mogelijk geen belangrijke factor is, zoals in HVAC-units of ventilator- en ventilatorachtige apparaten. In dergelijke gevallen wordt de frequentie van de belasting gevonden door te verwijzen naar het vereiste snelheidsniveau van de motor, en wordt verwacht dat de rotorsnelheid ongeveer de momentane synchrone snelheid volgt. Elke vorm van discrepantie in de snelheid als gevolg van het slippen van de motor wordt over het algemeen genegeerd en geaccepteerd in dergelijke toepassingen.
Referentie: http://www.ti.com/lit/an/sprabq8/sprabq8.pdf
Vorige: Inzicht in pull-up en pull-down weerstanden met diagrammen en formules Volgende: 18650 2600 mAh batterijgegevensblad en werkend