In dit project gaan we leren hoe we een eenvoudig unipolair stappenmotor-stuurcircuit kunnen maken met behulp van een 555 timer-IC. Afgezien van de 555-timer hebben we ook IC CD 4017 nodig, wat een decenniumteller-IC is.
Door Ankit Negi
Elke unipolaire motor kan op dit circuit worden aangesloten om een specifieke taak uit te voeren, hoewel u eerst enkele kleine wijzigingen moet aanbrengen.
De snelheid van de stappenmotor kan worden geregeld met een potentiometer die is aangesloten tussen ontlading en drempel pin van 555 timer
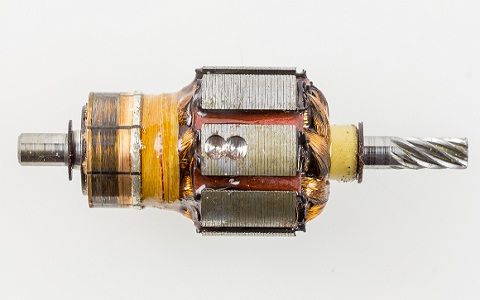
Stappenmotor Basics
Stappenmotoren worden gebruikt in gebieden waar een specifieke hoeveelheid rotatie vereist is, wat niet haalbaar is met gewone gelijkstroommotoren. Een typische toepassing van stappenmotor is in een 3D-PRINTER. Er zijn twee soorten populaire stappenmotoren: UNIPOLAR en BIPOLAR.
Zoals de naam suggereert, bevat de unipolaire stappenmotor wikkelingen met een gemeenschappelijke draad die gemakkelijk een voor een kunnen worden bekrachtigd.
Terwijl een bipolaire stappenmotor geen gemeenschappelijke aansluiting tussen spoelen heeft, waardoor deze niet eenvoudig kan worden aangedreven door het voorgestelde circuit te gebruiken. Om een bipolaire stappenmotor aan te drijven, hebben we een H-brugcircuit nodig.
COMPONENTEN:
1. 555 TIMER IC

twee. CD 4017 IC

3. WEERSTANDEN 4.7K, 1K


4. POTENTIOMETER 220K

5. 1 uf CONDENSATOR

6. 4 DIODEN 1N4007

7. 4 TRANSISTORS 2N2222

8. EENPOLIGE STAPPENMOTOR

9. DC-STROOMBRON
DOEL VAN TIMER 555:
555-timer is hier vereist om klokpulsen met een bepaalde frequentie te genereren (kan worden gevarieerd met een pot van 220k) die de snelheid van de stappenmotor bepaalt.
IC 555 Pinout-gegevens

DOEL VAN CD4017:
Zoals hierboven al vermeld, is het een decadenteller-IC, d.w.z. het kan tot 10 klokpulsen tellen. Het bijzondere aan dit IC is dat het een eigen ingebouwde decoder heeft. Hierdoor hoeft u geen extra IC toe te voegen om binaire getallen te decoderen.
4017 telt tot 10 klokpulsen vanaf 555 uur en geeft een hoge output die overeenkomt met elke klokpuls één voor één uit de 10 outputpinnen. Er is slechts één pin tegelijk hoog.
DOEL VAN TRANSISTORS:
Er zijn hier twee doelen van transistor:
1. Transistors werken hier als schakelaars en bekrachtigen dus één spoel per keer.
2. Transistors zorgen ervoor dat er hoge stroom doorheen gaat en vervolgens door de motor, waardoor de 555-timer volledig wordt uitgesloten, aangezien deze zeer weinig stroom kan leveren.
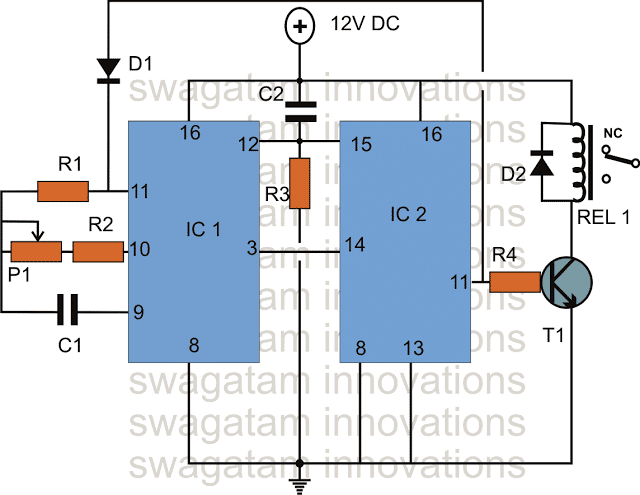
SCHAKELSCHEMA:

Maak de aansluitingen zoals weergegeven in de afbeelding.
1. Sluit pin 3 of de uitgangspen van 555 timer aan op pin 14 (klokpin) van IC 4017.
2. Verbind activeringspin of 13e pin van 4017 met aarde.
3. Verbind de pinnen 3,2,4,7 een voor een met respectievelijk de transistoren 1,2,3,4.
4. Verbind de 10 en 15e pin met aarde via een 1k-weerstand.
5. Verbind de gemeenschappelijke draad van de stappenmotor met de plus van de voeding.
6. Sluit andere draden van de stappenmotor zodanig aan dat de spoelen één voor één worden bekrachtigd om een volledige omwenteling correct te voltooien. (U kunt het gegevensblad van de motor van de fabrikant raadplegen)
WAAROM IS UITVOERPEN 10 VAN IC 4017 VERBONDEN MET ZIJN PIN 15 (RESET PIN)?
Zoals hierboven al vermeld telt 4017 klokpulsen één voor één tot 10e klokpuls en geeft dienovereenkomstig een hoge output op de outputpennen, elke outputpin gaat hoog.
Dit veroorzaakt een zekere vertraging in de rotatie van de motor die niet nodig is. Omdat we alleen de eerste vier pinnen nodig hebben voor een volledige omwenteling van de motor of de eerste vier decimale tellingen van o tot 3, pennr. 10 is verbonden met pin15 zodat IC na de 4e tel opnieuw wordt gereset en het tellen weer vanaf het begin begint. Dit zorgt ervoor dat de motor niet wordt onderbroken.
WERKEN:
Na het correct maken van de aansluitingen als u het circuit inschakelt, zal de motor in stappen gaan draaien. 555 timer produceert klokpulsen afhankelijk van de waarden van weerstand, potentiometer en condensator.
Als u de waarde van een van deze drie componenten verandert, verandert de frequentie van de klokpuls.
Deze klokpulsen worden gegeven aan IC CD 4017 die vervolgens de klokpulsen een voor een telt en 1 als uitvoer geeft aan respectievelijk pin 3,2,4,7 en dit proces continu herhaalt.
Omdat transistor Q1 is verbonden met pin 3, schakelt deze eerst in en vervolgens transistor Q2, gevolgd door Q3 en Q4. Maar als de ene transistor is ingeschakeld, blijven alle andere uit.
Als Q1 is ingeschakeld, werkt het als een gesloten schakelaar en stroomt de stroom door de gemeenschappelijke draad naar draad 1 en vervolgens naar aarde via transistor Q1.
Dit bekrachtigt spoel 1 en de motor draait onder een hoek die afhangt van de klokfrequentie. Dan gebeurt hetzelfde met Q2 die spoel 2 bekrachtigt, gevolgd door spoel 3 en spoel 4. Aldus wordt een volledige omwenteling verkregen.
Wanneer de potentiometer wordt gedraaid:
Laten we zeggen dat de aanvankelijke positie van de pot zodanig is dat er maximale weerstand (220k) is tussen ontlading en drempelpen. De formule voor de frequentie van de uitgangsklokpuls is:
F = 1,44 / (R1 + 2R2) C1
Uit de formule blijkt duidelijk dat de frequentie van klokpulsen afneemt naarmate de waarde van R2 toeneemt. Dus als R2 of de waarde van de pot maximaal is, is de frequentie minimaal, waardoor IC 4017 langzamer telt en een meer vertraagde uitvoer geeft.
Als de waarde van weerstand R2 afneemt, neemt de frequentie toe, wat een minimale vertraging veroorzaakt tussen de uitgangen van IC 4017. En dus draait de stappenmotor sneller.
Dus de waarde van de potentiometer bepaalt de snelheid van de stappenmotor.
SIMULATIE VIDEO:
Hier kun je duidelijk zien hoe het toerental van de motor varieert met weerstand R2. De waarde wordt eerst verlaagd en vervolgens verhoogd, wat op zijn beurt eerst de snelheid van de stappenmotor verhoogt en vervolgens afneemt.
Een paar: Hoe Crank-zaklampen werken Vervolg: Arduino-toerentellercircuit voor nauwkeurige metingen