In deze post onderzoeken we wat een BLDC-motor is en vervolgens leren we over het ontwerp van een sensorloos BLDC-motorstuurcircuit.
BLDC CPU-ventilatoren
Heb je die snel bewegende ventilatoren gezien in CPU's, spanningsstabilisatoren, dvd-spelers en andere soortgelijke apparatuur, die uiterst efficiënt werken, een minimum aan ruimte en stroom verbruiken en toch de belangrijke bewerkingen kunnen uitvoeren zoals voorgeschreven voor de specifieke apparatuur?
Ja, dit zijn allemaal moderne versies van BLDC-ventilatoren of de borstelloze DC-motoren die veel beter zijn dan de oude traditionele borstelmotoren.

Afbeelding met dank aan: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Een BLDC-motor vereist echter een geavanceerd stuurcircuit, en ja, al deze CPU-ventilatoren bevatten deze ingebouwde stuurprogrammamodules, hoewel deze gemakkelijk te bedienen lijken met een gewone gelijkstroom, is het systeem intern al uitgerust met een slim circuit.
BLDC-motorstuurprogramma
Hier zullen we leren over zo'n slim BLDC-motorstuurcircuit, met behulp van een enkele chip DRV10963 voor het aandrijven van een kleine BLDC-motor met ongelooflijke efficiëntie, en later in een van de komende artikelen zullen we zien hoe dit IC-circuit kan worden geüpgraded om zelfs te rijden. de krachtige BLDC's met hoge stroomsterkte, zoals degene die zijn gebruikt in quadcopters.
Maar daarvoor zou het interessant zijn om iets over BLDC-motoren te leren.
Verschil tussen geborstelde en borstelloze gelijkstroommotoren
Het verschil tussen een brushed motor en een brushless motor en het rendement is vrij duidelijk.
Aangezien bij geborstelde motoren het gewikkelde anker zelf tussen magneten beweegt, moet het gebruik maken van 'borstels' (wrijfcontacten) zodat de bewegende spoelaansluitingen de voedingsspanning consistent kunnen ontvangen zonder de voedingsbron zelf te hoeven bereiken, waardoor de werken onmogelijk en brengen de operaties in gevaar.
In een borstelloze motor beweegt de spoel of de wikkeling nooit en is deze constant, hier draagt de rotor een set permanente magneten en roteert onder invloed van de magnetische fluxen van de omringende wikkeling.
Omdat de magneet vrij is van al het gedoe en in staat is te werken zonder dat er aansluitingen nodig zijn om stroom te beheren of te ontvangen, kan hij moeiteloos ronddraaien, met hoge snelheid en vrijwel geruisloos ronddraaien.
Maar hier zit een addertje onder het gras. Om een elektromagneet te laten reageren op de fluxen van een permanente magneet, moet er een constante verschuiving van magnetische fase of polen zijn, zodat de twee tegenhangers constant kunnen reageren en door een tegengestelde kracht gaan, waardoor de vereiste torsiekracht over de rotor en voer de rotatie uit met het resulterende koppel.
In een geborstelde motor wordt dit gemakkelijker vanwege de zelfaanpassende aard van de ankerspoel die kan roteren en een zelfonderhoudende tegengestelde magnetische kracht creëert en blijft draaien zonder de noodzaak van externe pulsen of bewerkingen.
In een BLDC wordt dit echter een probleem, aangezien de magneetrotor 'geen idee' blijft en een berekend magnetisch commando van de wikkeling vereist om op een zinvolle manier te roteren en niet op een lukrake manier.
Dat is precies waarom alle BLDC-motoren verplicht een motorstuurcircuit nodig hebben voor het besturen van de drie verschillende windingen in de motor.
Alle BLDC zijn dus in wezen driefasige motoren en hebben verplicht 3 fasen nodig om het rotatiekoppel op de rotor te produceren.
Wat doen sensorloze BLDC-stuurprogramma's?
Het sensorloze BLDC-stuurcircuit elektrificeert eenvoudig de 3 sets wikkelingen op een sequentiële manier, zodat de magnetische rotor in staat is om een constante tegenkracht te doorstaan, waardoor de motor een aanhoudend koppel en rotatiekracht kan bereiken.
Maar deze opeenvolgende bekrachtiging van de BLDC-wikkeling door het circuit kan niet zomaar willekeurig worden ingesteld, het moet in tandem zijn of in reactie op de rotatiepositie van de rotormagneet, anders kan de implementatie in de war raken en kunnen we getuige zijn van de motoras (rotor ) lukraak roteren, dat wil zeggen tussen de klok mee en tegen de klok in schokken zonder zinnige rotatie.
Waarom sensoren worden gebruikt in BLDC-motoren
Daarom introduceren we sensoren die in veel BLDC-motorvarianten zijn gepositioneerd, deze sensoren (meestal Hall-effectsensoren) 'begrijpen' de veranderende positie van de magnetische polen van de rotormagneet, instrueren het aangesloten processorcircuit om de bijbehorende wikkeling te elektrificeren en een roterende beweging uit te voeren met een optimaal koppel.
Hall-effectsensoren worden effectief gebruikt in de meeste BLDC-motoren die relatief groter zijn, maar voor kleinere motoren zoals CPU-ventilatoren, CPU-drives, dvd-spelers, in kleine afzuigventilatoren, voor motoren die worden gebruikt in quadcopters, kunnen Hall-effectsensoren ongeschikt worden en daarom wordt een alternatieve sensorloze benadering geïmplementeerd.
Dit omvat de exploitatie van de inherente tegen-EMF-elektriciteit van de wikkeling die wordt gebruikt als referentiebron voor het verwerken en elektrificeren van de relevante wikkelingssets en het uitvoeren van het rotatiekoppel.

Simuleren van een BLDC-rotorbeweging
In de bovenstaande ruwe simulatie kunnen we visualiseren hoe de vrijgekomen EMF als referentie wordt genomen en gebruikt voor het produceren van de sequentie-pulsen voor de volgende sets van wikkelingen, waarbij een roterend koppel wordt opgelegd aan de centrale permanente-magneetrotor. De simulatie is misschien niet de exacte replicatie, maar geeft toch een globaal idee van het werkingsprincipe.
Het is interessant om op te merken dat de puls wordt geschakeld wanneer de N / S van de magneet zich precies in het midden van de wikkelkern bevindt, waardoor de wikkeling kan worden bekrachtigd als N of S, afhankelijk van de pulspolariteit en een aantrekkende en afstotende kracht op de N / S-magneten, waardoor het vereiste koppel op het hoogst mogelijke niveau wordt gegenereerd.
En dit wordt op zijn beurt mogelijk dankzij de EMF aan de achterkant die vrijkomt door het omschakelen van de vorige wikkeling.
De bovenstaande discussie verduidelijkt de werking van een sensorloze BLDC-motor, laten we nu eens kijken hoe een gespecificeerd circuit de bovenstaande complexe uitvoering van een 3-faseschakeling afhandelt
BLDC-stuurprogramma DRV10963
Na wat Googelen vond ik dit sensorloze BLDC-stuurcircuit met behulp van een enkele chip DRV10963 die een verwaarloosbaar aantal onderdelen in de configuratie gebruikt en toch in staat is om een geavanceerde verwerking voor de beoogde acties te implementeren.
De DRV10963 is een ultramoderne chip die specifiek is ontworpen om sensorloze BLDC-motoren te bedienen door alleen te anticiperen op de achter-EMF van de motorwikkeling en een nauwkeurig commando over de wikkeling te geven en een optimaal rotatiekoppel over de rotor te bereiken.
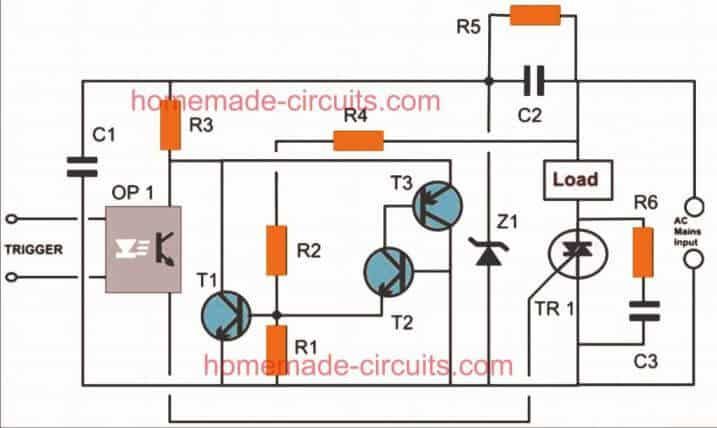
Schakelschema

De bovenstaande afbeelding toont de eenvoudige lay-out van het circuit dat blijkbaar niets anders bevat dan het IC zelf.
De verschillende pinouts zijn toegewezen voor het uitvoeren van de gespecificeerde functies zoals PWM-snelheidsregeling van de motor, richtingsregeling, enz. Door simpelweg de relevante pinouts te voeden met de gespecificeerde gegevens van een externe bron.
De volgende afbeelding toont de verpakking van de chip, die eruitziet als een 10-pins DIL IC, de verschillende pinout-functies van dezelfde kunnen worden bestudeerd aan de hand van de gegevens zoals geleverd onder het diagram:

Verwijzend naar het schakelschema van het voorgestelde sensorloze BLDC-stuurcircuit zoals gepresenteerd in het vorige artikel en ook de chipafbeelding hierboven, kunnen de details van de pinouts als volgt worden opgevat:
IC Pinout-gegevens
FG = Het is de motor snelheid indicator pin (output), die is opgetuigd in een open collector modus met een interne BJT.
Open collector betekent dat de uitgang op deze pinout de negatieve PWM's zal produceren door logica over de open collector en aarde te laten zinken, dus om een geldige meting te krijgen, moet de gebruiker een pull-up-weerstand over deze open collector en de positieve voeding (5V ) voor het bereiken van de snelheidsindicatie op deze pinout.
FGS = Het is de ingang van de snelheidsindicator, wat betekent dat hier een logische hoge of lage waarde kan worden ingevoerd om de indicatorpen FG AAN / UIT te schakelen.
Vcc = De positieve voeding naar de IC om deze te laten werken, mag niet hoger zijn dan 5V.
W, U en V zijn de driefasige uitgangen voor de BLDC-motor die via dit IC moet worden bediend. Dit werkt ook als ingangen voor het detecteren van de motor-EMV-pulsen voor het vereiste gesynchroniseerde schakelen van de motorspoelen.
GND = Verwijst naar de negatieve voedingspinout van de IC met betrekking tot de Vdd-pin.
FR = Helpt bij het selecteren of besturen van de richting van de motor en kan op elk moment dynamisch worden gewijzigd zodra het systeem wordt gevoed, simpelweg door een externe logische hoge of logische lage waarde te introduceren.
PWM = Dit geeft de PWM-besturingsinvoer aan van een externe PWM-golfvormgenerator.
Deze PWM-ingang kan variabel zijn voor het implementeren van de gewenste snelheidsregeling van de aangesloten BLDC-motor.
De gestippelde ruimte in het midden van de chip geeft de thermische pad aan, die kan worden vastgeklemd of aangedrukt met een koellichaam om de mogelijke warmteontwikkeling op de chip te verminderen terwijl deze wordt gebruikt met een geladen BLDC-motor.
De bovenstaande bespreking vermeldt de pinout of de verbindingsdetails van de sensorloze BLDC-motorstuurchip DRV10963, laten we nu de interne configuratie en werking van de chip in detail analyseren met behulp van de volgende punten:
Apparaat beschrijving
De DRV10963 is een 3-fasen sensorloze elektromotor-aandrijving met ingebouwde vermogens-MOSFET's (3-fasen H-overbrugd). Het is op maat gemaakt voor hogere productiviteit, minder lawaai en minimale motoraandrijvingsfuncties van het aantal secundaire materialen. Het exclusieve sensorloze, vensterloze 180 ° sinusoïdale beheersysteem zorgt voor een ruisvrije efficiëntie van het woon-werkverkeer.
De DRV10963 bestaat uit een slimme vergrendelingsdetectiefunctie, gecombineerd met aanvullende ingebouwde beveiligingscircuits om beveiligde prestaties te bereiken. De DRV10963 bevindt zich in een thermisch efficiënte 10-pins USON-verpakking met een onbedekte thermische mat.
Hoe de IC werkt
Het DRV10963-product is een driefasige sensorloze motoraandrijving met geïnfundeerde vermogens-MOSFET's
speciaal gemaakt voor superieure prestaties, verminderde resonantie en minimale oppervlakkige motoraandrijffuncties van het aantal onderdelen.
Het belangrijkste sensorloze, vensterloze 180 ° sinusoïdale besturingsplan biedt een geruisloze motorwerking door de nominaal elektrisch gestimuleerde koppelrimpel te behouden. Bij initialisatie gaat het DRV10963-apparaat de motor draaien in de koers die is gespecificeerd via de FR-ingangspen.
De DRV10963-chip gaat een 3-fasen BLDC-motor laten werken door gebruik te maken van een sinusvormig besturingsplan.
De significantie van de toegepaste sinusvormige fasespanningen hangt af van de duty-cycle van de PWM-pin. Terwijl de motor beweegt, levert de DRV10963 IC de snelheidsgegevens op de FG-pin.
De DRV10963-eenheid heeft een slimme vergrendelingsfunctie. In het geval dat de motor wordt belemmerd door een externe druk, gaat het programma het vergrendelingsprobleem identificeren en zal het zelf maatregelen nemen om samen met de motor te beveiligen.
De specifieke procedure van het slotdetectieschakeling wordt in detail beschreven in Slotdetectie. De DRV10963 IC bevat verder meerdere ingebouwde veiligheidscircuits, bijvoorbeeld overstroombeveiliging, overspanningsbeveiliging, onderspanningsbeveiliging en overtemperatuurbeveiliging.
Kenmerkende uitleg
Snelheidsinvoer en controle
De DRV10963 presenteert 3-fasen 25-kl-lz PWM-uitgangen die een standaardpercentage sinusvormige golfvormen van fase tot fase kunnen hebben. In het geval dat een cyclus wordt bepaald met betrekking tot aarde, is de gedetecteerde golfvorm waarschijnlijk een PWM-beschermde sinusoïde gecombineerd met harmonischen van de derde orde, zoals weergegeven in figuur 2.

Deze coderingsstrategie stroomlijnt de stuurprogrammaspecificaties omdat er waarschijnlijk vaak één fase-uitvoer zal zijn die gelijk kan zijn aan nul.
De uitkomstamplitude varieert afhankelijk van de voedingsspanning (VCC) en de verplichte PWM-duty-cycle (PWM) zoals gedefinieerd in vergelijking 1 en gemarkeerd in figuur 3. De optimale amplitude wordt geïmplementeerd zodra de geïnstrueerde PWM-duty-cycle 100 PERCENT is.
Vphpk = PWMdc>

Het motortoerental wordt niet rechtstreeks geregeld door het gebruik van de PWM-opdracht om de amplitude van de fasespanningen die toevallig voor de motor worden gebruikt, te regelen.
De duty-cycle van PWM-invoer wordt gewijzigd in een 9-bits digitale grootheid (van 0 tot 511).
De resolutie van de regelgeving is 1/512 == 0,2%. De duty-cycle-analysator vergemakkelijkt een initiële orderuitwisseling tussen de input-duty-cycle en de 9 bits digitale figuur.
Dit wordt benadrukt in Figuur 4, waarin r = 80 ms.

De uitwisselingsprestaties tussen de door PWM bestelde werkcyclus en de maximale outputamplitude zijn variabel in het DRV10963-apparaat.
De maximale amplitude van de uitkomst wordt besproken door vergelijking 1 wanneer PWM-opdracht> minimale werkingscyclus. De laagste bedrijfscyclus wordt vaak vastgesteld op mogelijk 13%, 10%, 5% of geen beperking door de OTP-instelling (MINOP_DC1: 0).
Tabel 1 toont de aanbevolen configuraties voor de minimale bedrijfscyclus.
Telkens wanneer de door PWM geïnstrueerde inschakelduur minder is dan de laagste functionerende inschakelduur en meer dan 1,5%, wordt de output geregeld op de minimale inschakelduur. Elke keer dat de inschakelduurcyclus onder de 1,5% ligt, zal het DRV10963-apparaat de uitvoer waarschijnlijk niet uitvoeren en naar de stand-bymodus worden gestuurd.
Dit kan worden geïllustreerd in figuur 6.

Rotatieconfiguraties
DRV10963 zal de motor starten door middel van een techniek die gedetailleerd is weergegeven in figuur 7.

De motorinitialisatiegrafiek bestaat uit door het apparaat configureerbare alternatieven voor de omschakellimiet tussen open lus en lus (HOW.), Uitlijntijd (TAHQH) en versnellingssnelheid (RACE).
Om de rotor in lijn te brengen met de commutatielogica, voert de DRV10963 een x% duty-cycle uit op fasen V en W en stuurt tegelijkertijd fase U op GND.
Dit scenario duurt TAIign seconden. De x% significantie wordt geïdentificeerd door de VCC-spanning (zoals weergegeven in tabel 2) om voldoende rotatiekoppel over verschillende voedingsspanningen te behouden.
Terwijl de uitlijnsequentie volbrengt, wordt de motor gedwongen te versnellen door sinusoïdale fasespanningen aan te zetten met piekniveaus zoals geïllustreerd in tabel 2 en te versterken door middel van het commutatiebereik met een toenemende snelheid weergegeven door RACE totdat het niveau van commutatie groeit naar Hom ., Hz.
Zodra deze limiet is bereikt, schakelt de DRV'l0963 over naar een gesloten lus, waarbij de voortgang van de commutatiesturing wordt herkend door het ingebouwde besturingsalgoritme, terwijl de gebruikte spanning wordt geïdentificeerd door de PWM-verplichte duty cycle-invoer.
De omschakellimiet van open lus naar sluitlus (Hom), uitlijntijd (TAHQH) en de acceleratiesnelheid (RACE) zijn configureerbaar via OTP-configuraties.
De selectie van de overdrachtsdrempel (HOE) wordt doorgaans goedgekeurd door middel van vallen en opstaan. Het doel zou zijn om een overdrachtstolerantie te verkiezen die zo min mogelijk zou kunnen zijn en die de motor in staat stelt om moeiteloos en getrouw om te schakelen tussen de open-lusversnelling en de gesloten-lusversnelling.
Gewoonlijk motoren met verhoogde snelheid (maximale snelheid) vereisen een superieure overdrachtstolerantie vanwege het feit dat motoren met verhoogde snelheid een verminderde Kt en dus een meer betaalbare BEMF bevatten.
Tabel 3 toont de configureerbare voorkeuren voor de overdrachtstolerantie. De hoogste snelheid in elektrische Hz is bewezen als een referentie om te helpen bij het kiezen van de gewenste overdrachtssnelheid voor een specifieke inzending.

De keuze van uitlijntijd (TAHQH) en versnellingssnelheid (RACE) kan zelfs afhankelijk zijn van vallen en opstaan.
Motoren met een grotere traagheid vereisen normaal gesproken een langere uitlijntijd en een tragere versnellingssnelheid in tegenstelling tot motoren met een lage inertie die gewoonlijk een kortere uitlijntijd vereisen samen met een sneller versnellingspercentage. Afwegingen tussen programma's moeten worden geïmplementeerd om te profiteren van de stabiliteit van de lancering in plaats van de rotatieperiode.
TI onderschrijft om te beginnen met het beslissen over de minder intense configuraties (langzamere RACE en aanzienlijke Tmign) om de koppel-up-tijd in gevaar te brengen ter ondersteuning van maximale vervulling.
Zodra wordt bevestigd dat de apparatuur gewetensvol presteert, kunnen de extra krachtige configuraties (grotere RACC en lagere TAHQH) worden gebruikt om het opkomstmoment te verminderen en tegelijkertijd voorzichtig het vervullingspercentage bij te houden.
Tabel 4 toont de configureerbare instellingen voor TA'g, en RACE.

Het resterende deel van de uitleg over deze sensorloze BLDC IC wordt geleverd in deze originele datasheet
Aarzel niet om commentaar te geven om meer te weten over de hierboven besproken sensorloze BLDC-motorstuurcircuitdetails
Een paar: 12V LED-rugzakvoedingscircuit Volgende: Quadcopter Remote Control Circuit zonder MCU