Het bericht legt uit hoe je een goedkope maar krachtige op afstand bestuurbare trolley kunt maken die naar wens naar links, rechts, vooruit en achteruit kan worden gemanoeuvreerd door de gebruiker met behulp van de meegeleverde afstandsbediening. Het idee is niet afhankelijk van een microcontroller-circuit.
In een van mijn vorige berichten besprak ik een eenvoudig op afstand bestuurbaar speelgoedautocircuit is het huidige idee van een op afstand bestuurbare trolley geïnspireerd op hetzelfde concept, maar is bedoeld om te worden gebruikt voor het vervoeren van formidabele en veel zwaardere ladingen.
Trolley met afstandsbediening voor verkooppunten
Dit ontwerp kan specifiek geschikt en toepasbaar zijn voor winkelcentra of winkelcentra waar het kan worden geïmplementeerd als een klein transportvoertuig voor het transporteren van materiaal binnen de compound of het gebouw met behulp van een paar persen van de afgelegen Tx-eenheid.
De eerste stap bij het bouwen van de voorgestelde op afstand bestuurbare trolley zou zijn om een set standaard Rx / Tx RF-modules aan te schaffen bij uw lokale elektronische dealer of bij een online winkel, ik raad aan om bij een online winkel te kopen, omdat dit veel gemakkelijker en gemakkelijker zou zijn. , hoewel duurder.
De aangekochte eenheden zien er als volgt uit:
Met behulp van de 433 MHz Tx, Rx-modules

De bruine kleureenheid aan de linkerkant is de Tx of de zendereenheid, terwijl het aangrenzende circuit de Rx of de ontvangereenheid is.
De Tx-eenheid is te zien met 4 roodgekleurde knoppen gemarkeerd als A, B, C, D, en het Rx-bord kan worden gezien met 4 relais (zwarte kleurvakken).
De vier respectieve knoppen van de Tx-module zijn draadloos met elkaar verbonden voor het bedienen van de vier overeenkomstige relais van de Rx-module.
U kunt connectoren rond de randen van het bord zien (groen van kleur), deze connectoren worden op de juiste manier afgesloten met de (+) (-) voedingsingangen voor het Rx-bord en ook met de relaiscontacten voor alle 4 relais.
Een relais, zoals we allemaal weten, bestaat uit 5 basiscontacten en hun pinouts, namelijk: 2 pinnen voor de spoel, één voor de pool en één voor de N / C en de N / O.
Aangezien er 4 relais in de Rx-eenheid zijn, kunt u 5 x 4 = 20 uitgangen vinden die zijn gekoppeld aan de relevante aansluitpunten.
Het kan een vervelende taak zijn om deze relaisaansluitingen op de connectoren afzonderlijk op te sporen, dus ik raad aan om draden rechtstreeks op de relais-pinouts te solderen om uzelf van de bovenstaande taak te redden, deze inspanning zal later nodig zijn terwijl we de eenheid met de stuurcircuit van de trolley.
Bouwen van het relaisbesturingscircuit voor de trolley
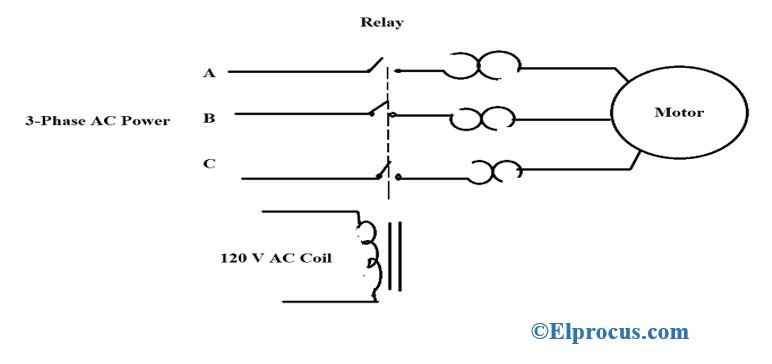
Hiervoor heeft u een handvol relais en diodes nodig. De relais moeten de juiste classificatie hebben om de krachtige wielmotoren van de trolley aan te kunnen. Ik raad aan om hiervoor OEN-maakrelais te gebruiken, zoals weergegeven in de volgende afbeelding:

De diodes die nodig zijn in het relaisstuurcircuit kunnen onze standaard 1N4007-diodes zijn.
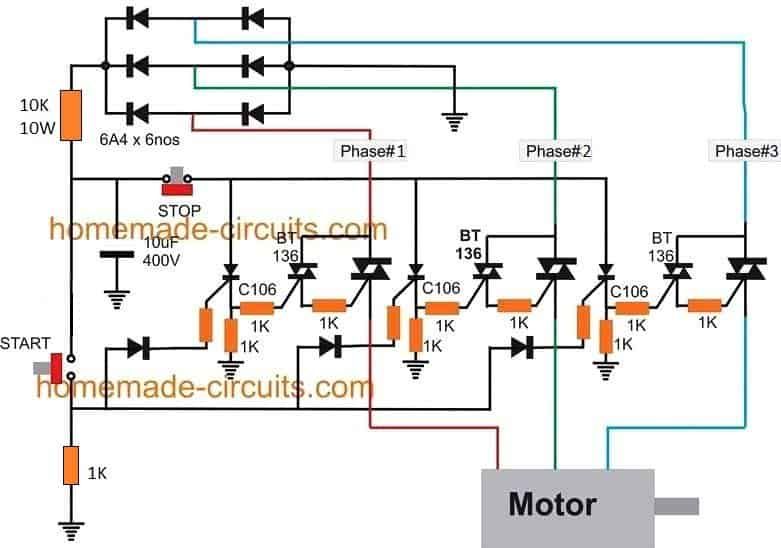
De circuitdetails voor hetzelfde kunnen worden gezien in het volgende diagram:
Relay bedradingsdetails en schema


Hoe het Remote Trolley Circuit werkt
Met behulp van de hierboven gespecificeerde relais en de diodes moet u het bouwen van de bovenstaande relaisstuurprintplaat voltooien, wat eenvoudig kan worden gedaan op een stuk verobord.
Hierna hebben we een grote taak tot onze beschikking, namelijk het integreren van de groene draden die in het bovenstaande diagram worden weergegeven met het Rx-bord van de afstandsbediening.
Voor de integratie zullen we enkele mods in de Rx-module moeten invoegen, zoals hieronder uitgelegd:
Gebruik stukjes geïsoleerde draden, op de juiste manier gestript en vertind aan de uiteinden, ga door met het verbinden (door solderen) van alle poolpinnen van het relais en verbind deze gemeenschappelijke verbinding met de positieve lijn van het Rx-bord.
Nu kunnen we in deze situatie aannemen dat wanneer de relais niet in een geactiveerde toestand zijn (via de afstandsbediening), de positieve poolingang van elk relais wordt gekoppeld aan hun respectieve N / C-punten, en wanneer deze wordt geactiveerd, zal de positieve van de pool shift en maak verbinding met de relevante N / O-punten.
Kortom, bij activering krijgt het maakcontact de positieve voeding en daarom zijn we geïnteresseerd in deze positieve voeding van de maakcontacten omdat deze alleen worden gestart als de relais worden geactiveerd, wat inhoudt dat wanneer de Tx (zender ) knoppen worden ingedrukt.
Daarom moeten alle relevante N / O-pinouts worden aangesloten op de groene draden van het hierboven aangegeven relaisstuurcircuit.
Zodra dit is gebeurd, zal de Rx worden geïntegreerd met de relaisbesturingsmodule voor het uitvoeren van alle beoogde manoeuvres van de op afstand bestuurbare trolley, dat wil zeggen: vooruit, achteruit, bewegingen en links en rechts draaien.
Voeding van de relaisstuurkaart
Aangezien de relais in de relaisaanstuurfase verantwoordelijk zouden zijn voor het verplaatsen van de zware motoren die zijn verbonden met het trolleywiel, zou de voeding hiervoor even sterk moeten zijn, daarom worden loodzuuraccu's met een diepe cyclus bij uitstek geschikt voor deze toepassing.
Ervan uitgaande dat de motoren een nominaal vermogen van 12 V hebben, zou een loodzuurbatterij van 40 AH goed genoeg zijn om de trolley zelfs met zwaardere ladingen te laten rijden.
De wielen met de motoren configureren voor de beoogde manoeuvres
Zoals kan worden aangegeven in de volgende afbeelding, heeft de besproken op afstand bestuurbare trolley 4 wielen nodig om het systeem te ondersteunen en te rollen.
Alleen de voorste twee wielen zouden verantwoordelijk zijn voor het mogelijk maken van de beoogde achteruit, vooruit, rechts en links manoeuvres, en daarom zouden de motoren moeten worden vastgeklemd met deze twee voorwielen van de trolley, zoals weergegeven in de volgende afbeelding:

De trolleywielverbindingen configureren
De achterwielen zijn slechts blinde wielen, alleen vastgezet om de trolley vrij te laten rollen, als reactie op de commando's van het voorwiel.
Zoals te zien is in de bovenstaande afbeelding, is de module die is gemarkeerd als PCB-assemblage de relaisstuurkaart, de externe module betekent de Rx-ontvangerkaart op afstand, terwijl de batterij de 40 AH 12V-batterij is die we in het vorige gedeelte van het artikel hebben besproken.
Na de montage moet u mogelijk de motordraadverbindingen aanpassen en controleren met de relaisbesturingskaart.
Voor een voorwaartse en achterwaartse beweging moeten beide motoren synchroon lopen met elkaar, en voor het uitvoeren van een rechts- of linksomdraaiing moeten de motoren een tegengestelde rotatiebeweging maken.
Als u merkt dat de motor zich niet op de bovenstaande manier gedraagt, kan dit hoogstwaarschijnlijk worden gecorrigeerd door simpelweg de polariteit van een van de motoren om te wisselen. Dit zal de situatie onmiddellijk corrigeren en de motoren dwingen om de gespecificeerde manoeuvres uit te voeren.
Ten slotte kunnen de A.B-, C-, D-knoppen op de juiste manier worden afgestemd of verwisseld voor elk van de respectieve manoeuvres door de groene draadverbindingen aan te passen met de Rx-module, volgens de persoonlijke voorkeur van de gebruiker.
Een paar: Hoe SMPS te wijzigen voor instelbare stroom- en spanningsoutput Volgende: Microgolfsensor of een Doppler-sensorcircuit