De post bespreekt een eenvoudig RC-helikopterafstandsbedieningscircuit met behulp van 433 kHz RF-modules, zonder enige microcontroller of complexe joystickimplementaties.
Het idee werd aangevraagd door de heer Jitendra.
Circuitdoelstellingen en -vereisten
- Ik maak een grootschalige RC-helikopter. Waarbij ik 4 motoren gebruik. Voor de 1e 12v hoofdmotor: het mechanisme is dat ik wil dat de snelheid wordt geregeld door een controller-toets op de afstandsbediening, van 0 tot volle snelheid.
- Voor 2de 3v-motoren: het mechanisme is alleen voor voorwaartse en achterwaartse rotatie met een individuele sleutel op de afstandsbediening voor elke motor, omdat het de tuimelschijven van rotoren zal bedienen.
- Voor de 3e 9v-staartmotor: deze moet op een evenwichtssnelheid worden ingesteld met behulp van een regelaar op de ontvangerkaart van de helikopter, zodat ik de snelheid handmatig kan aanpassen om te voorkomen dat de helikopter ... meedraait met de rotors, en er zit een sleutel op de afgelegen zou zijn om de motor te vertragen en te versnellen vanuit zijn evenwicht.
- Het ingangsvermogen in het ontvangerkaart zou 12v zijn en de huidige 8-10 ampère. Het moet een bereik van 500-800 meter zijn. Meneer, kunt u alstublieft samen met de afstandsbediening zo'n RC-printplaat ontwerpen.
- Ik ben sinds twee jaar op zoek naar zo'n printplaat.
- Mijn project is gestopt wegens afwezigheid. Meneer, help me alsjeblieft. Voor uw gemak kunt u twee afzonderlijke rc-printplaten ontwerpen, een voor de hoofdmotor en de staartmotor en een andere voor twee voorwaarts en achterwaarts roterende motoren.
- Maar de ingangsstroom en het potentiaalverschil in beide circuits moeten hetzelfde zijn, met hetzelfde bereik dat 500-800 meter is met zijn afstandsbedieningen of afstandsbediening. Vermeld ook de naam van de benodigde componenten met nummering.
Het ontwerp
De gevraagde circuitmodules die nodig zijn voor het bouwen van de voorgestelde RC-helikopter zijn:
1) Een 12 V PWM variabele snelheidsregelaar
2) Een 3V motor achteruit vooruit controller circuit.
3) een 9V motorregelaar met een circuit met variabele snelheidsregelaar.
Alle bovenstaande specificaties moeten worden aangestuurd via een lange afstand 433 MHz RF afstandsbedieningsmodule
De gewenste 433 MHz RF-afstandsmodule kan worden gekocht bij elke online winkel of bij uw dichtstbijzijnde elektronische dealer. Het bereik van de afstandsbediening moet overeenkomen met de vereiste specificaties van het bereik van de RC-helikopter, hier zou het binnen 1 km moeten zijn.
Voor het besproken afstandsbedieningscircuit van de RC-helikopter zou een 6-kanaals RF-afstandsmodule nodig zijn, precies hetzelfde als degene die werd gebruikt voor onze eerdere eenvoudigste drone-afstandsbedieningscircuit
Het beeld van hetzelfde is hieronder te zien:

Het groene bord aan de linkerkant is de ontvangermodule op afstand met de zes stuurrelais en deze eenheden moeten in de RC-helikopter worden geïnstalleerd voor de nodige bedieningshandelingen.
De rechterzijde is de handzender die door de gebruiker moet worden vastgehouden en de relevante knoppen moeten worden ingedrukt voor het bedienen van de relaiskaart met de bijbehorende bewegingsbesturingsinformatie.
Laten we nu zien hoe de zes relais moeten worden geconfigureerd met de verschillende PWM-circuits en geïnstalleerd in de RC-chopper, aan de hand van de volgende details:
Onthoud dat de relaiscontacten die op de ontvangerkaart worden weergegeven, allemaal standaard leeg zijn, wat betekent dat hun verbreek- en verbreekcontacten niet bedraad zijn en moeten worden bedraad zoals geïllustreerd in de volgende diagrammen.
Volgens het verzoek moeten de 9V-motor en de 12V-motorsnelheden worden geregeld door erop te drukken op de afstandsbediening. De circuits voor het implementeren van deze functie worden hieronder weergegeven:
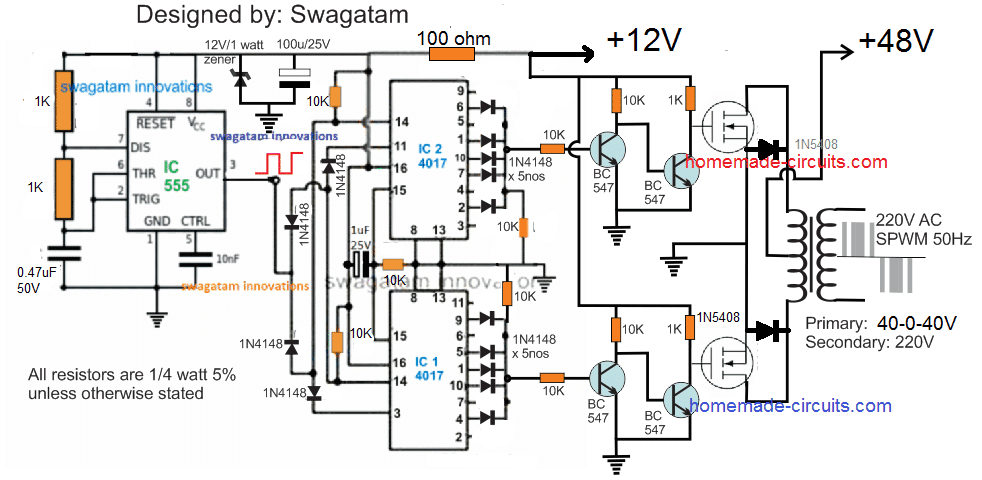
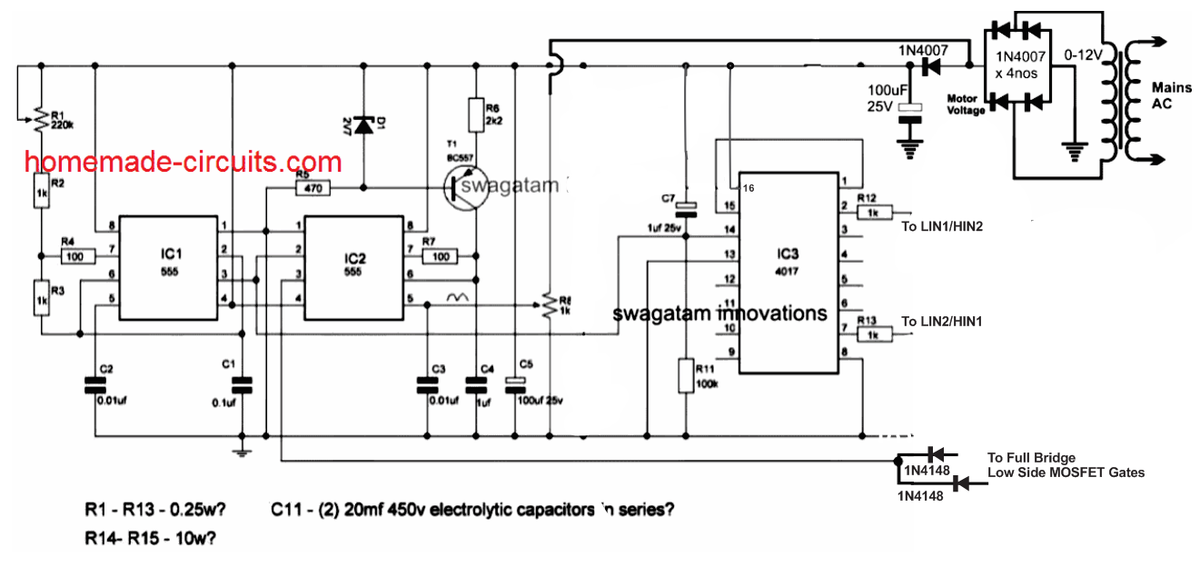
Schema motorbesturing


Circuitwerking
Zoals te zien is in de schema's, een paar identiek IC 555 PWM-schakelingen worden gebruikt voor het doel. Vier van de zes relais zijn hier ingeschakeld met hun relevante contacten bedraad over de getoonde aansluitingen.
In het ontwerp is het IC 555 is opgetuigd als een standaard astabiel circuit, toegewezen om te oscilleren met een bepaalde frequentie afhankelijk van de R1-, R2- en C-componentwaarden
Een spanningsvolger in de vorm van IC 741 is geconfigureerd met de controlepen # 5 van de IC 555 om de PWM-inhoud op pin # 3 van de IC 555 te variëren in overeenstemming met de aangegeven relaisbewerkingen.
De spanning op pin # 3 van de IC 741 wordt gevolgd of overgedragen op pin # 6 en vervolgens naar pin # 5 van de IC 555. Afhankelijk van het laadniveau van pin # 3 condensator kan deze variërende spanning ergens tussen de voedingsspanningslimiet en nul.
Het laadniveau op de condensator wordt gevarieerd of gewijzigd door deze eenvoudig op te laden of te ontladen via de relevante activering van het relaiscontact. Voor het opladen wordt het bovenste relaiscontact gesloten of geactiveerd, waardoor een stijgende spanning op pin # 5 van IC 555 mogelijk wordt, terwijl het activeren van de onderste relaiscontacten de condensator ontlaadt, waardoor een proportioneel lagere spanning verschijnt op pin # 5 van de IC 555.
De bovenstaande acties vertalen de resultaten van pin # 3 in een overeenkomstig variërende PWM's die er op hun beurt voor zorgen dat de motor sneller of langzamer loopt.
Van de 9V-motor is een reeks diodes te zien die zijn bevestigd aan de emitter van de driver-transistor, dit zorgt voor de vereiste spanningsval en helpt om de 12V om te zetten in een ongeveer 10V gereguleerde voeding volgens de specificaties van de motor.
3V motor achteruit vooruit werking
De derde en laatste eis in het verzoek betreft de achteruit / vooruit bediening van de 3V-motor met behulp van de knop van de afstandsbediening op de afstandsbediening.
De overige twee relais kunnen nu worden gebruikt voor deze specifieke uitvoering, en wordt gedaan zoals getoond in het volgende diagram:

Ook hier gebruiken we de veelzijdige IC 555 bedraad als een nauwkeurig PWM-generatorcircuit. De PWM wordt op de juiste manier ingesteld via de 5K-preset voordat de installaties worden voltooid, zodat de snelheid van de motor perfect wordt aangepast aan het vereiste evenwicht van de helikopter.
De relais kunnen eenvoudig worden bedraad om de vereiste achteruit- en voorwaartse of rechts- of linksdraaiende beweging voor de motor af te dwingen als reactie op het omschakelen van het gepaarde relaiscontact, die samen een DPDT-relais vormen.
Om kortsluiting te voorkomen, moet de ontvangermodule bij voorkeur worden aangepast voor deze twee relais, zodat het indrukken van een van de knoppen ervoor zorgt dat beide relais samen worden geactiveerd in plaats van bruin, afhankelijk van het feit dat twee schakelaars synchroon worden ingedrukt voor de activering.
Dit omschakelen zal naar verwachting de motorrotatie in de tegenovergestelde richting doen kantelen, waardoor de gebruiker de vereiste richtingsveranderingen in de RC-helikoptermachine kan uitvoeren.
Hiermee zijn de instructies voor het circuit en de relaisbedrading voor het voorgestelde afstandsbedieningscircuit van de RC-helikopter afgerond. Als u nog twijfels hebt, aarzel dan niet om deze via uw opmerkingen kenbaar te maken.
Een paar: Ultrasoon slim automatisch AAN / UIT-schakelcircuit Volgende: Enkele MOSFET klasse A vermogensversterkercircuit