
Ultrasone motoren werden in 1965 uitgevonden door V.V Lavrinko. In het algemeen zijn we ons bewust van het feit dat de aandrijfkracht wordt gegeven door het elektromagnetische veld in de conventionele motoren. Maar hier om een aandrijfkracht te leveren, gebruiken deze motoren de piëzo-elektrisch effect in het ultrasoon frequentiebereik, dat van 20 kHz tot 10 MHz is en niet hoorbaar is voor normale mensen. Daarom wordt het piëzo-elektrische USM-technologie genoemd. Ultrasone technologie wordt gebruikt door de USM's die de ultrasone trillingskracht van een component gebruiken voor hun werking.

Ultrasone motor
Voordat we in detail over deze technologie ingaan, moeten we de informatie over het ultrasone sensoren , piëzo-elektrische sensoren en piëzo-elektrische actuatoren.
Piëzo-elektrische sensor

De veranderingen in de fysische grootheden zoals rek, kracht, spanning en versnelling kunnen worden gemeten door deze om te zetten in elektrische energie. De apparaten of sensoren die voor dit proces worden gebruikt, worden de piëzo-elektrische sensoren genoemd. En dit proces wordt de piëzo-elektrisch effect Als er een spanning over een kristal wordt aangelegd, zal de druk op de atomen van het kristal worden uitgeoefend, waardoor de atomen worden vervormd die slechts 0,1% bedraagt.
Ultrasoon sensor

Ultrasoon sensor
De transducers die een hoge frequentie genereren - een frequentie van ongeveer 20 kHz tot 10 MHz geluidsgolven - en die het doel toekennen door het tijdsinterval te lezen tussen het ontvangen van de echo nadat het signaal is verzonden, worden ultrasone sensoren genoemd. Vandaar, Ultrasone sensoren kunnen worden gebruikt voor obstakeldetectie en om botsingen te voorkomen.
Piëzo-elektrische actuator

Voor de fijnafstelling van de lenzen van een camera, spiegel, bewerkingsgereedschap en andere soortgelijke apparatuur is een nauwkeurige bewegingscontrole vereist. Deze precieze bewegingscontrole kan worden bereikt door de piëzo-elektrische actuatoren. Het elektrische signaal kan worden omgezet in nauwkeurig gecontroleerde fysieke verplaatsing met behulp van een piëzo-elektrische actuator. Deze worden gebruikt voor het regelen van de hydraulische kleppen en motoren voor speciale doeleinden.
Piëzo-elektrische ultrasone motortechnologie
We kunnen de ultrasone technologie eenvoudigweg het omgekeerde van het piëzo-elektrische effect noemen, omdat in dit geval de elektrische energie wordt omgezet in beweging. Daarom kunnen we het een piëzo-elektrische USM-technologie noemen.
Het piëzo-elektrische materiaal genaamd loodzirkonaattitanaat en kwarts wordt heel vaak gebruikt voor USM's en ook voor piëzo-elektrische actuatoren, hoewel de piëzo-elektrische actuatoren verschillen van de USM's. De materialen zoals lithiumniobaat en enkele andere monokristallijne materialen worden ook gebruikt voor USM's en piëzo-elektrische technologie.
Het belangrijkste verschil tussen de piëzo-elektrische actuatoren en USM's wordt genoemd als de trilling van de stator in contact met de rotor, die kan worden versterkt door de resonantie te gebruiken. De amplitude van de beweging van de actuator ligt tussen 20 en 200 nm.
Soorten ultrasone motoren
De USM's zijn ingedeeld in verschillende typen op basis van verschillende criteria, die als volgt zijn:
Classificatie van USM's op basis van het type motorrotatie
- Roterende motoren
- Lineaire motoren
Classificatie van USM's op basis van de vorm van de vibrator
- Staaf type
- П gevormd
- Cilindrisch gevormd
- Ring (vierkant) type
Classificatie op basis van het type trillingsgolf
- Staand golftype - het wordt verder onderverdeeld in twee typen:
- Unidirectioneel
- Bidirectioneel
- Voortplantingsgolftype of lopende golftype
Werking van de ultrasone motoren

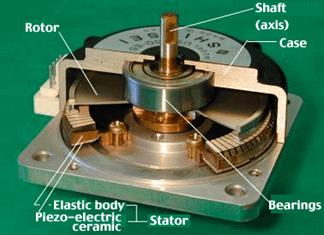
Ultrasone motor werkt
De trilling wordt in de stator van de motor geïnduceerd en wordt gebruikt om de beweging naar de rotor over te brengen en ook om de wrijvingskrachten te moduleren. De versterking en (micro) vervormingen van actief materiaal worden gebruikt voor het genereren van de mechanische beweging. De macro-beweging van de rotor kan worden bereikt door het corrigeren van de micro-beweging met behulp van de wrijvingsinterface tussen de stator en de rotor
De ultrasone motor bestaat uit stator en rotor. De werking van de USM verandert de rotor of lineaire vertaler. De stator van de USM bestaat uit piëzo-elektrisch keramiek voor het opwekken van trillingen, een metaal van de stator voor het versterken van de gegenereerde trillingen en een wrijvingsmateriaal om contact te maken met de rotor.
Elke keer dat er spanning wordt aangelegd, wordt een lopende golf gegenereerd op het oppervlak van het statormetaal waardoor de rotor gaat draaien. Omdat de rotor in contact is met het statormetaal, zoals hierboven vermeld - maar alleen bij elke piek van de lopende golf - die de elliptische beweging veroorzaakt - en, met deze elliptische beweging, roteert de rotor in de richting omgekeerd aan de richting van de reizende golf.
Kenmerken en verdiensten van ultrasone motoren
- Deze zijn klein van formaat en reageren uitstekend.
- Deze hebben een lage snelheid van tien tot enkele honderden tpm en een hoog koppel, en daarom zijn reductietandwielen niet vereist.
- Deze bestaan uit een hoog vasthoudvermogen en zelfs als de stroom is uitgeschakeld, hebben ze geen rem en koppeling nodig.
- Ze zijn klein, dun en hebben minder gewicht in vergelijking met andere elektromagnetische motoren.
- Deze motoren bevatten geen elektromagnetisch materiaal en genereren geen elektromagnetische golven. Deze kunnen dus zelfs in gebieden met een hoog magnetisch veld worden gebruikt, aangezien deze niet worden beïnvloed door het magnetische veld.
- Deze motoren hebben geen versnellingen en voor het aandrijven van deze motoren wordt een onhoorbare frequentietrilling gebruikt. Ze maken dus geen geluid en werken erg stil.
- Met deze motoren is een nauwkeurige snelheids- en positieregeling mogelijk.
- De mechanische tijdconstante voor deze motoren is minder dan 1 ms en de snelheidsregeling voor deze motoren is stap minder.
- Deze motoren hebben een zeer hoog rendement en hun rendement is ongevoelig voor hun grootte.
Gebreken van ultrasone motoren
- Een hoogfrequente voeding is vereist.
- Omdat deze motoren op wrijving werken, is de duurzaamheid veel minder.
- Deze motoren hebben aflopende snelheidskoppelkarakteristieken.
Toepassingen van ultrasone motoren
- Gebruikt voor de autofocus van de cameralens.
- Gebruikt in compacte papierverwerkingsapparatuur en horloges.
- Gebruikt bij het vervoeren van machineonderdelen.
- Gebruikt voor drogen en ultrasoon reinigen.
- Wordt gebruikt om olie in de branders te injecteren.
- Gebruikt als de beste motoren waarvan bekend is dat ze een groot potentieel bieden voor miniaturisatie van apparatuur.
- Gebruikt bij MRI-scanning met magnetische resonantiebeeldvorming in de geneeskunde.
- Wordt gebruikt om de schijfkoppen van computers zoals diskettes, harde schijven en cd-stations te besturen.
- Gebruikt in veel toepassingen op het gebied van geneeskunde, ruimtevaart en robotica
- Wordt gebruikt om het rolscherm automatisch te regelen.
- In de toekomst kunnen deze motoren toepassingen vinden in de auto-industrie, nano-positionering, micro-elektronica, Micro Electro Mechanische Systeemtechnologie en consumptiegoederen.
Dit artikel bespreekt in het kort de piëzo-elektrische ultrasone motoren, ultrasone sensoren, piëzo-elektrische sensoren, piëzo-elektrische actuatoren, de werking van USM's, verdiensten, nadelen en toepassingen van USM's. Voor meer informatie over de bovenstaande onderwerpen kunt u uw vragen posten door hieronder te reageren.
Fotocredits:
- Ultrasonic Motor van alleen seminars
- Piëzo-elektrische sensor van imagesco
- Ultrasone sensor van iseerobot
- Piëzo-elektrische actuator van robotplatform
- Werking van UltrasonicMotors door elektrode





{kind=link}
{kind=link}
{kind=link}
{kind=link}