
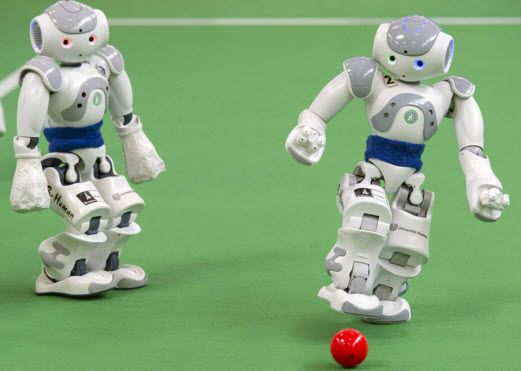
Robots zijn automatische elektromechanische apparaten die op mensen of dieren lijken en worden bestuurd door een elektronische schakeling of computerprogramma. Er zijn verschillende soorten robots die voor worden gebruikt verschillende soorten applicaties Recente trends in robottechnologie hebben geleid tot de ontwikkeling van geavanceerde robots zoals chirurgische robots zijn op afstand bediende manipulatoren die worden gebruikt voor operaties (met name kijkoperaties), lopende robots die meestal meerbenig zijn en kunnen bewegen door te lopen, microbots en nanobots zijn microscopisch en deze nano-robots of nano-apparaten die in het menselijk lichaam worden gebruikt om ziekten te genezen, de rovers zijn robots met wielen die worden gebruikt om op andere planeten te lopen voor verkenning van de ruimte. Meestal zijn robots die in ruimtetoepassingen worden gebruikt autonome robots , modulaire herconfigureerbare robots of zelfherconfigureerbare modulaire robots, enzovoort.
Modulaire herconfigureerbare robots
Modulaire herconfigureerbare robots zijn over het algemeen autonome kinematische apparaten met instelbare morfologie. In robots met een vaste morfologie kunnen alleen de conventionele taken zoals aandrijving, detectie en besturing alleen worden uitgevoerd. Maar zelfherconfigureerbare robots of modulaire herconfigureerbare robots zijn in staat om hun eigen vormen te veranderen door de connectiviteit van hun onderdelen zodanig te reorganiseren dat ze nieuwe omstandigheden kunnen aanpassen, nieuwe taken kunnen uitvoeren en herstellen van schade.

Modulaire herconfigureerbare robots
Deze zelfherconfigureerbare robots kunnen worden gedefinieerd als robots die van vorm kunnen veranderen op basis van het pad dat ze moeten doorlopen. Als een robot bijvoorbeeld door een smalle buis moet, zal hij zichzelf opnieuw configureren in de vorm van een worm en als hij een oneffen terrein moet oversteken, dan zal hij zijn vorm opnieuw configureren met spinachtige poten. Als er een vlak terrein is, zal het zichzelf opnieuw configureren als een balachtige structuur voor snelle bewegingen.
Deze herconfigureerbare robots worden opnieuw ingedeeld in twee typen op basis van ontwerp. Zoals homogene modulaire robotsystemen bestaat uit verschillende modules met een soortgelijk ontwerp om een zodanige structuur te vormen dat een vereiste taak kan worden uitgevoerd. Een heterogeen modulair robotsysteem bestaat uit verschillende modules met verschillende ontwerpen die elk specifieke functies vervullen en deze worden gebruikt om een structuur te vormen die een vereiste taak uitvoert.
Herconfigureerbare robots in ruimtevaarttoepassingen
Als onderdeel van onderzoek naar de andere planeten, lanceren veel landen regelmatig verschillende satellieten of ruimtemissies om de omstandigheden en kenmerken van de planeten te bestuderen. Voor het verkrijgen van gegevens op lange termijn worden dus ruimtemissies op lange termijn gelanceerd en deze ruimtemissies op lange termijn zijn typisch zelfherconfigureerbare systemen.
Deze zelfherconfigureerbare robots zijn in staat om onvoorziene situaties aan te pakken en zichzelf te repareren in geval van schade. We weten dat ruimtemissies enorm zijn en massaal beperkt, dus het is gunstig als we zelfconfigureerbare robots gebruiken die meerdere taken kunnen uitvoeren in plaats van meerdere robots die elk slechts één bepaalde taak uitvoeren.

Robots die worden gebruikt in ruimtevaarttoepassingen
Tot op heden hebben mensen een andere voet gezet dan dat de aarde alleen de maan is. Terwijl modulaire robots die in ruimtetoepassingen worden gebruikt, op veel andere planeten worden gelanceerd. Een reeks landers, manipulatoren, orbiters en rovers die naar Mars worden gestuurd, zijn beroemde robots die in ruimtetoepassingen worden gebruikt.
Robotmanipulatoren en Rovers
Er zijn verschillende soorten taken die worden uitgevoerd door gelede robots in de ruimte. Het proces van het onderhouden van de apparatuur of apparatuur in de ruimte wordt ruimtemanipulatie genoemd, die wordt uitgevoerd door gelede robots. Polybot is goed geschikt voor onderhoud en inspectie van ruimtestations of satellieten. Robotmanipulatoren worden geprojecteerd voor positionering in de ruimte of op andere planeten om menselijke manipulatievaardigheden na te bootsen. Ze zijn over het algemeen gepositioneerd op vrijvliegende ruimtevaartuigen of op baanafstemming van andere ruimtevaartuigen, in ruimtevoertuigen, planetaire landers en rovers om monsters te verzamelen.

Robotmanipulator
Robotvoertuigen worden geprojecteerd voor positionering op planeten om menselijke bewegingsvaardigheden na te bootsen. Ze worden vaak op de aardse planetenoppervlakken geplaatst, klein zonnestelsels , aerobots (planetaire atmosferen), cydrobots (ijslagen) en hydrobots (vloeistoflagen).
Geautomatiseerd ontwerp en optimalisatie
Modulaire herconfigureerbare robots of modulair robotsysteem worden gecombineerd met softwaretools om te helpen bij het selecteren en ontwerpen van de beste morfologie en besturingsstructuur voor het uitvoeren van elke specifieke taak. Hoewel veel kenmerken van dit ontwerp voor de voorspelbare toekomst onvermijdelijk afhankelijk zullen zijn van menselijke intelligentie, zijn andere kenmerken geschikt voor geautomatiseerd ontwerp en optimalisatie. Alle herconfigureerbare robots die in ruimtetoepassingen worden gebruikt, moeten zo zijn ontworpen dat ze kunnen overleven met lanceringsspanningen, straling in de ruimte, het vacuüm, de planetaire distributie en de omgeving van de planeet (planeet waarop herconfigureerbare robots worden gebruikt of op doelplaneten).
Er zijn twee soorten ontwerpen van herconfigureerbare robots en dat zijn: Lattice-gebaseerde ontwerpen en Chain-gebaseerde ontwerpen.

Op rooster gebaseerde ontwerpen van herconfigureerbare mannelijke robots
In op roosters gebaseerde ontwerpen is herconfiguratie eenvoudig, maar het is moeilijk om beweging te genereren en dit ontwerp vereist meer aantal connectoren en actuatoren.

Op ketting gebaseerde ontwerpen van herconfigureerbare robot
In kettinggebaseerde ontwerpen is herconfiguratie moeilijk en heeft onvoldoende stijfheid, maar het is gemakkelijk om beweging te genereren.
Modulaire herconfigureerbare robotsimulatie
Een op fysica gebaseerde softwaresimulatieomgeving werd ontwikkeld met C ++ die gebruikers in staat stelt herconfigureerbare robots te bouwen met behulp van verschillende soorten modules. Extra moduletypes worden toegevoegd met compatibele connectoren om de simulatie uit te breiden.
Praktisch voorbeeld van een zelfherconfigureerbare modulaire robot

Modulaire transformatormodule
Modulaire transformator is een van de vaak gebruikte herconfigureerbare robots en deze M-TRAN-modules worden gebruikt om een 3D-structuur te vormen (die zijn eigen configuratie kan veranderen en ook in staat is om kleine robots te genereren), multi-DOF-robot (die flexibel kan voortbewegen), en metamorfoserende robot. Deze modulaire transformator bestaat uit twee actuatoren en batterij.

Intern diagram van M-TRAN-module
Intern blokschema van de M-TRAN-module, het bestaat uit een Li-ion-batterij, niet-lineaire veer, voedingsschakeling, hoofd-CPU, versnellingssensor, permanente magneet, SMA-spoel, verbindingsplaat en PIC.
Deze herconfigureerbare robots worden gebruikt in ruimtevaarttoepassingen voor het bereiken van de specifieke doelen zoals telecommunicatievoorziening, observatie boven de aarde voor gegevensteruggave, militaire haalbaarheid en navigatie doeleinden
Er zijn veel andere robotgebaseerde projecten en toepassingen:
- Ultrasoon Obstakel-gedetecteerd robotvoertuig
- Beweging van robotvoertuigen via mobiele telefoon
- Robotvoertuig bestuurd door een tv-afstandsbediening
- Track Sensing beweging van robotvoertuigen
- Brandbestrijdingsrobot
- Spraakgestuurd robotvoertuig
- Kies N Place Robot Draadloos bediend door Android
- Metaaldetector Robotvoertuig
- Auto metro trein naar shuttle tussen stations
- RF-gestuurd robotvoertuig
- Op afstand bestuurbaar robotvoertuig met touchscreen
Ik hoop dat dit artikel korte informatie geeft over modulaire herconfigureerbare robots die in ruimtetoepassingen worden gebruikt. Voor meer informatie over robotgebaseerde elektronicaprojecten u kunt ons benaderen door uw vragen in de opmerkingen hieronder te plaatsen.
Fotocredits
- Modulaire herconfigureerbare robots door asmedigitalcollection
- Robots gebruikt in ruimtevaarttoepassingen door robotnor
- Robot Manipulator van iccrobotics
- Op rooster gebaseerde ontwerpen van mannelijke herconfigureerbare robot door csail.mit
- Op ketting gebaseerde ontwerpen van herconfigureerbare robot door wikimedia
- Modulaire transformatormodule van unit.aist
- Intern diagram van M-TRAN-module door slidesharecdn




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}