De post legt een eenvoudig lijnlasergestuurd motorbesturingscircuit uit, dat werkt door te reageren op een nauwkeurige horizontale laserlijn, gegenereerd door een lijnlaserwaterpasapparaat, en automatisch de uitlijning van het aangesloten gereedschap of het werk met extreme perfectie en nauwkeurigheid aanpast.
Wat is lijnlaser
De lijnlaserapparatuur is een zeer nauwkeurige elektronische vervanging van de timmerlieden eeuwenoude waterpasuitlijner.
Het lijnlaserapparaat is eigenlijk een geavanceerd laseremitterend apparaat dat een 360 kan genereren hoge precisie verlichte horizontale laserlijn, voor een kalibratiereferentie voor alle industriële of bouwtechnische taken, zodat het eindresultaat van de taak perfect recht en uitgelijnd is zonder de minste fout.
Het circuit is aangevraagd door een van de toegewijde lezers van deze blog, de heer Rafal.
De gedetailleerde besprekingen over de werkprocedure van de lijnlasergestuurde motor kunnen worden geleerd uit de volgende paragrafen:
Ontwerpdoelstelling
Dhr. Rafal: Ik ben hier erg nieuw in. Ik heb de afgelopen weken wat onderzoek gedaan en heb niet precies gevonden wat ik nodig heb.
Ik zal je dankbaar zijn voor alle hulp. Ik voeg een foto van mijn idee toe. Ik wil twee 12 V DC motoren aansturen met een laserniveau.
Het lijnlaserniveau zal de ontvangers signaleren.

Dit signaal zal dan de richting van de 12 V DC motor moeten regelen. De motor draait de draadstang heen en weer om de hoogte van het gereedschap aan te passen.
Van wat ik ontdekte, zouden er verschillende fotodiodes parallel zijn aangesloten, de ene ingesteld om de laser boven nul te detecteren en de andere onder dat niveau. Het nulniveau is slechts een soort pauze tussen de fotodiodes om te voorkomen dat het systeem wakker wordt. Lasersensor zonder display. Ik heb alleen een picturale foto gegeven.
Ik heb een H-brugcircuit nodig, maar alles wat ik vind, moet worden gebruikt met een Arduino-systeem. Indien nodig kan ik een kant-en-klare brug aanschaffen voor een redelijke prijs van maximaal $ 30
Idealiter zou dit werken met zowel rode als groene lasers, maar de golflengten zijn zo verschillend dat ik betwijfel of het zou kunnen worden gedaan en dat het niet zou werken over het hele lichtspectrum.
In eerste instantie zou ik het niveau van deze balk die aan de motoren is bevestigd willen instellen met de knoppen omhoog en omlaag. Ik zou heel blij zijn als de tweede motor zich dan tijdens het opzetten gelijk zou stellen met de gyroscoop, maar zonder de Arduino zou het erg moeilijk kunnen zijn.
Ik voel dat wat ik probeer te doen zo eenvoudig is dat ik weg kan komen zonder Arduino te gebruiken. En ik sta op een analoog, vanwege de moeilijke omstandigheden op een bouwplaats en het lijkt mij dat hoe meer elektronica, hoe onbetrouwbaarder het apparaat.
Het werkt alleen binnenshuis en de laserafstand is maximaal 10 meter. De motor die ik in het begin aantrof heeft een groot stroomverbruik van 200mA max 2,19 A, maar ook een groot koppel.
Voeding 18 V DC van een Makita-batterij.
Bij voorbaat dank voor eventuele suggesties.
Groeten uit Polen
Rafal
Swag : Ik heb een verwarring over de werking van de motorassen. De draadschroef op beide motoren duwt het gereedschap, maar kan het niet terugtrekken? Hoe gaat dat in zijn werk?
Is het mogelijk om hetzelfde te implementeren met een enkele motor?
Dhr. Rafal: Lagere nivelleerlijnen zouden misschien 70 cm zijn, alleen voor kleine kamers, bijv. een toilet zodat je via een deur naar binnen kunt.
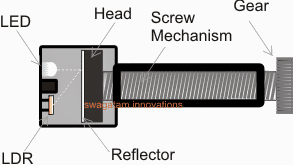
Machine zonder aandrijving, met de hand getrokken, alleen rechttrekken uitlijnen. In de video zijn de twee gele objecten op masten laserdetectoren die stevig aan de linialen zijn bevestigd.
De laser staat ergens verder weg en produceert een horizontale lijn.
De motoren zouden aan een kar worden bevestigd en de schroef met schroefdraad aan het nivelleren van linialen met laserdetectoren. Er moeten twee motoren zijn om beide zijden waterpas te stellen, maar het is in spiegelbeeld.
Het enige gemeenschappelijke deel zou een tweekanaals H-brug zijn alsof ik het zou doen vanuit een kant-en-klare module en mogelijk een gyroscoop, maar dat is een droom :).
Het is belangrijk dat er een knop is voor het toerental van de linker en rechter motor.
De procedure is deze. Ik hang de laser bijvoorbeeld 2 m boven het aangegeven vloerniveau. Ik meet 2 meter vanaf de laserstraal tot de onderkant van de linialen.
Ik regel de hoogte door op de knoppen de schakelaars rechts-links te drukken zodat deze gelijk is aan 2 meter tot de onderkant van de linialen. Ik heb de detectoren op de masten geplaatst zodat de laserstraal tussen de fotodiodesecties op nul staat. En de rest doet het vanzelf
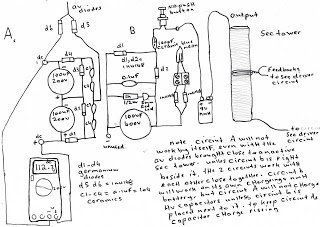
In de bijlage heb ik een tekening gemaakt van de detectorwerking.
Rafal
Circuit ontwerp

Als we naar de bovenstaande afbeelding kijken, zijn twee van dergelijke identieke circuittrappen nodig voor het detecteren en corrigeren van het bijbehorende motorgestuurde gereedschap met betrekking tot de nauwkeurigheid van de laserlijnrechtheid.
De twee identieke fasen zijn spiegelbeelden van elkaar, zoals hieronder weergegeven:

De schakelingen zijn redelijk eenvoudig. Het werkt met een venstercomparator die ervoor zorgt dat de aandrijfmotoren niet werken zolang het paar LDR's wordt belicht met dezelfde laserlijnhelderheid.
Op de niet-inverterende ingang van A1 en op de inverterende ingang van A2 wordt dan een halve voedingsspanning opgewekt.
Zodra een afbuiging in de laserlijn wordt gedetecteerd (wat kan gebeuren als het motorgestuurde gereedschap niet recht is uitgelijnd), verandert de helderheid die de LDR's R1 en R2 beïnvloedt.
In deze situatie drijft de ingangsspanning naar de venstercomparator weg van de helft van de voedingsspanning. Deze situatie zorgt ervoor dat de comparatoruitgang het motorbrugnetwerk opdracht geeft om de motor met de klok mee of tegen de klok in te bewegen.
Transistors T1.T4 zijn geconfigureerd als een brugnetwerk om het inschakelen van de motor mogelijk te maken vooruit en achteruit afhankelijk van de LDR-belichting of de afwijkingshoek van de laserlijn.
Diodes D1.D4 zijn gepositioneerd om spanningspieken te annuleren die worden gegenereerd gedurende de tijd dat de motor actief is en loopt. De functie van de vooringestelde potentiometers P1 en P2 is om de uitlijningsaanpassingen te vergemakkelijken.
Deze zijn nauwkeurig afgesteld om ervoor te zorgen dat de motor volledig is uitgeschakeld en inactief is, zolang het relevante LDR-paar wordt blootgesteld aan exact dezelfde laserlichthelderheid.
Laten we bijvoorbeeld zeggen dat als gevolg van een onjuiste uitlijning van het motorgestuurde gereedschap, de kanteling van de laserlijn het licht vermindert op LDR R2 dan op LDR R1. Hierdoor zal de spanning op punt A boven de helft van de voedingsspanning uitkomen.
In deze situatie wordt de Al opamp-uitgang hoog, waardoor de transistoren T1 en T4 moeten werken. Dit zorgt er weer voor dat de motor in de betreffende richting draait. Deze actie verschuift het aangesloten gereedschap automatisch in een rechte lijn totdat de nauwkeurigheid van de horizontale uitlijning samenvalt met de nauwkeurigheid van de laserlijn.
Omgekeerd, als we aannemen dat het gereedschap wordt gekanteld met de tegenovergestelde richting, zodat de verlichting van de LDR's tegengesteld is aan wat hierboven is besproken, zorgt dit ervoor dat de spanning op punt A onder de helft van de voedingsspanning daalt. Deze toestand zorgt ervoor dat de uitgang A2 op amp zo hoog gaat dat T3 en T2 operationeel worden.
Dit heeft tot gevolg dat de motor nu in de tegenovergestelde richting draait, in een poging de uitlijning van het gereedschap in de betreffende richting te corrigeren totdat het perfect recht wordt, samenvallend met de horizontale nauwkeurigheid van de laserlijn.
Omhoog / Omlaag-knop
De knoppen omhoog en omlaag voor het vooraf instellen van de hoogte van de waterpas kunnen eenvoudig worden geïmplementeerd door drukknopschakelaars parallel aan elk van de LDR's te bedraden.
LDR-installatie
Om de juiste respons van de LDR's te krijgen, moeten de linker-rechterparen in een buisachtige behuizing worden geïnstalleerd, zodat ze alleen de laserverlichting kunnen 'zien' en geen ander omgevingslicht.
Het idee is te zien in de volgende afbeelding:

Hier kunnen we zien dat de LDR's heel dicht bij elkaar zijn gepositioneerd, wat ervoor zorgt dat wanneer de laserlijn zich precies in het midden bevindt, een deel van de beide LDR-paren gelijkmatig door het laserlicht wordt verlicht.
De voorkant van de LDR-behuizing zou kunnen worden bedekt met een diffuse lens, zodat de laserbelichting binnenin gelijkmatig over de respectieve LDR's kan worden verspreid.
Een paar: Eenvoudig antidiefstalalarmcircuit om waardevolle items te beschermen Volgende: Universal BJT, JFET, MOSFET Tester Circuit