Een korte introductie tot een robot:
Een robot is elke machine die volledig automatisch is, dat wil zeggen dat hij uit zichzelf start, zijn eigen manier van werken bepaalt en vanzelf stopt. Het is eigenlijk een replica van de mens, die is ontworpen om de menselijke last te verlichten. Het kan pneumatisch of hydraulisch worden bediend of met behulp van de eenvoudige elektronische bedieningsmanieren. De eerste industriële robot was Unimates, gebouwd door George Devol en Joe Engelberger in de late jaren 50 en vroege jaren 60.
Elke robot is gebouwd op 3 basiswetten die zijn gedefinieerd door de Russische sciencefictionauteur Isaac Asimov:
- Een robot mag de mens niet direct of indirect schaden.
- Een robot moet menselijke bevelen opvolgen, tenzij en totdat hij de eerste wet overtreedt.
- Een robot moet zijn eigen bestaan beschermen, op voorwaarde dat de eerste twee wetten niet worden overtreden.

Een vaste robot
Robots kunnen vaste robots of mobiele robots zijn. Mobiele robots zijn robots met een mobiele basis waardoor de robot vrij in de omgeving kan bewegen. Een van de geavanceerde mobiele robots is de Line Follower Robot. Het is in feite een robot die een bepaald pad of traject volgt en zijn eigen handelwijze bepaalt die in wisselwerking staat met een obstakel. Het pad kan een zwarte lijn op de witte vloer zijn (zichtbaar) of een magnetisch veld (onzichtbaar). De toepassingen gaan van basis huishoudelijk gebruik tot industrieel gebruik, enz. De huidige toestand in de industrie is dat ze de pakketten of materialen van de ene plaats naar de andere plaats brengen met behulp van het kraansysteem. Soms kan het tillen van grote gewichten op dat moment leiden tot het breken van hijsmaterialen en ook tot schade aan de pakketten. De lijnvolgende robots worden vaak gebruikt om kinderen door winkelcentra, huizen, uitgaansgelegenheden en industrieën te vervoeren. Het gebruik van lijnvolgorde robotvoertuig is het transporteren van de materialen van de ene plaats naar de andere plaats in de industrie. Deze robotbeweging is volledig afhankelijk van de baan. De robot kan alles doen waarvoor u hem instelt. Net als in fabrieken hoeven ze alleen maar de robot te maken met het maken van hun producten.

Een mobiele robot
Lijnvolger-robot
Een lijnvolgerrobot is een robot die een bepaald pad volgt, bestuurd door een feedbackmechanisme.
Een basislijnvolger-robot bouwen:
Het bouwen van een eenvoudige Line Follower Robot omvat de volgende stappen.
- Ontwerpen van het mechanische deel of het lichaam van de robot
- De kinematica van de robots definiëren
- Ontwerpen van de besturing van de robot

Een lijnvolgerrobot
Het mechanische deel of lichaam van de robot kan worden ontworpen met AutoCAD of Workspace. Een basislijnvolgerrobot kan bestaan uit een basis aan de twee uiteinden waarvan de wielen zijn gemonteerd. Als basis kan een rechthoekige plaat van hard plastic worden gebruikt. Verder kan een stijf lichaam zoals een cilinder worden toegevoegd tezamen met andere gevormde lichamen die met elkaar zijn verbonden door verbindingen, en elk met zijn gedefinieerde beweging in een bepaalde richting. De lijnvolgerrobot kan een mobiele robot op wielen zijn met een vaste basis, een mobiele robot met poten met meerdere stijve lichamen die onderling zijn verbonden door gewrichten.
De volgende stap is het definiëren van de kinematica van de robot. Kinematische analyse van de robot omvat de beschrijving van zijn beweging met betrekking tot een vast coördinatensysteem. Het betreft voornamelijk de beweging van de robot en de beweging van elk lichaam in het geval van een robot met poten. Het gaat meestal om de dynamiek van de robotbeweging. Het hele traject van de robot wordt bepaald met behulp van de kinematische analyse. Dit kan met behulp van Workspace-software.
De besturing van de robot is het belangrijkste aspect van zijn werking. Hier verwijst de term besturing naar de robotbewegingsbesturing, dat wil zeggen het besturen van de beweging van de wielen. Een basislijnvolgerrobot volgt een bepaald pad en de beweging van de robot langs dit pad wordt bestuurd door de rotatie van wielen te regelen, die op de assen van de twee motoren worden geplaatst. De basiscontrole wordt dus bereikt door de motoren aan te sturen. Het regelcircuit omvat het gebruik van sensoren om het pad te detecteren en de microcontroller of een ander apparaat om de motorwerking te regelen via de motoraandrijvingen, op basis van de sensoruitgang.
2 manieren om een lijnvolgerrobot te besturen
- Zonder microcontrollers te gebruiken

Blokschema van het besturingssysteem
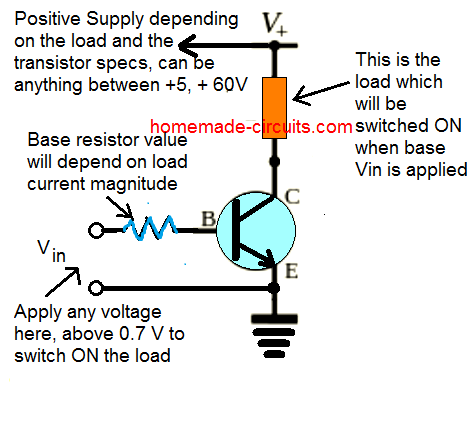
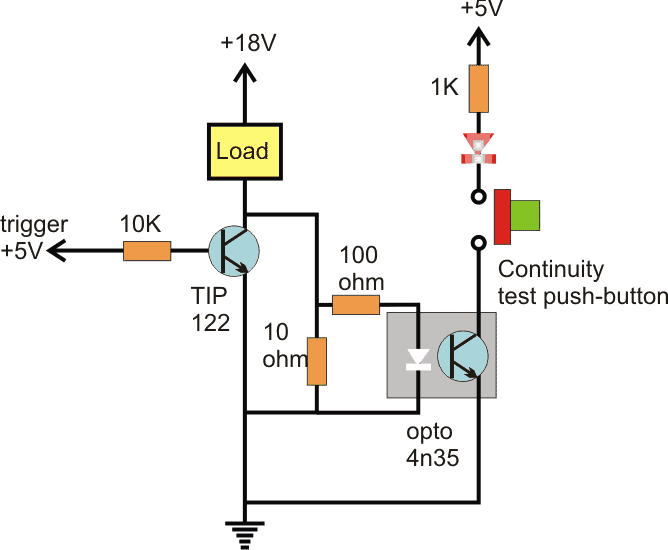
Het bestaat uit een IR-LED en fotodiode-opstelling voor elke motor die wordt aangestuurd door het in- en uitschakelen van de transistor.
De IR-LED die de juiste voorspanning krijgt, zendt infrarood licht uit. Dit IR-licht wordt gereflecteerd bij een wit oppervlak en het gereflecteerde IR-licht valt op de fotodiode. De weerstand van de fotodiode neemt af, wat leidt tot een toename van de stroom erdoorheen en dus de spanningsval eroverheen. De fotodiode is verbonden met de basis van de transistor en als gevolg van verhoogde spanning over de fotodiode gaat de transistor geleiden en krijgt de motor die is aangesloten op de collector van de transistor voldoende voeding om te gaan draaien. In het geval van een zwarte kleur op het pad dat een van de sensoropstellingen tegenkomt, wordt het IR-licht niet gereflecteerd en biedt de fotodiode meer weerstand, waardoor de transistor stopt met geleiding en uiteindelijk stopt de motor met draaien.
Het hele systeem kan dus worden bestuurd met behulp van een eenvoudige opstelling van LED-fotodiode-transistor.
- Met het gebruik van microcontrollers
Werkend principe:
De lijn braakrobot is een van de zelfsturende robots. Dat detecteert en braakt een lijn die op het gebied is getrokken. De lijn wordt aangegeven door een witte lijn op een blokoppervlak of bloklijn op een wit oppervlak. Dit systeem moet logisch zijn. Deze toepassing is afhankelijk van de sensoren. Hier gebruiken we twee sensoren voor paddetectie. Dat is een naderingssensor en een IR-sensor. De naderingssensor die wordt gebruikt voor paddetectie en de IR-sensor die wordt gebruikt voor obstakeldetectie. Deze sensoren zijn aan de voorkant van de robot gemonteerd. De microcontroller is een intelligent apparaat, het hele circuit wordt bestuurd door de microcontroller.

Blokschema van lijn die robotvoertuig volgt met microcontroller
Verschillende soorten lijngestuurde robotvoertuigen:
Er zijn twee soorten lijngestuurde robotvoertuigen
- Mobiel gebaseerd lijngestuurd robotvoertuig
- Op RF gebaseerd lijngestuurd robotvoertuig
Toepassingen van lijnvolgerrobot:
- Industriële toepassingen : Deze robots kunnen worden gebruikt als geautomatiseerde apparatuurdragers in industrieën die traditionele transportbanden vervangen.
- Automobiele toepassingen : Deze robots kunnen ook worden gebruikt als automatische auto's rijden op wegen met ingebouwde magneten.
- Huishoudelijke toepassingen : Deze kunnen ook in woningen worden gebruikt voor huishoudelijke doeleinden zoals vloerreiniging etc.
- Begeleidingstoepassingen : Deze kunnen worden gebruikt in openbare plaatsen zoals winkelcentra, musea enz. Om paden te begeleiden.
Voordelen:
- Robotbeweging is automatisch
- Het wordt gebruikt voor toepassingen over lange afstanden
- Eenvoud van bouwen
- Fit en vergeet-systeem
- Gebruikt in huis, industriële automatisering etc.