In deze post leren we een omgekeerd vooruit-timercircuit voor het bedienen van een couveuse-motormechanisme met een voorkeursreeks bewegingen. Het idee was aangevraagd door de heer Anwar
Technische specificaties
Ik kom uit Indonesië ... Ik heb schema's nodig voor de incubator-timer met motor met hoog koppel (DC-motor elektrisch raam in auto). Ik probeer een gelijkstroommotor in twee richtingen te laten draaien totdat hij de eindpositie bereikt, stop dan en verander van polariteit zodat hij in de andere richting draait wanneer de stroom weer wordt ingeschakeld. Doe dan hetzelfde aan de andere kant.
1. timer schakelt de stroom gedurende 1 minuut in. (7:00 uur -7: 01 uur)
2. motor draait in één richting tot hij de stoppositie bereikt, zeg 30 sec.
3. De stroom naar de motor wordt uitgeschakeld wanneer deze de stoppositie bereikt en vertraagt gedurende 1 minuut. timer om de hoofdstroom te beëindigen / uit te schakelen. keert ook de polariteit om, zodat.
4. de volgende keer dat de hoofdtimer wordt ingeschakeld (10: 00-10: 01), wordt hetzelfde gedoseerd in omgekeerde richting en continu herhaald
5. 12 VDC motor achteruit (slechts twee kabels van motor + en -)
6. Led-indicator nodig voor rev / fwd-motor
Kunt u mij helpen meneer?
Bij voorbaat dank voor alle hulp.
Dit is een belangrijk thuisproject dat 100% betrouwbaar moet zijn.
Het ontwerp

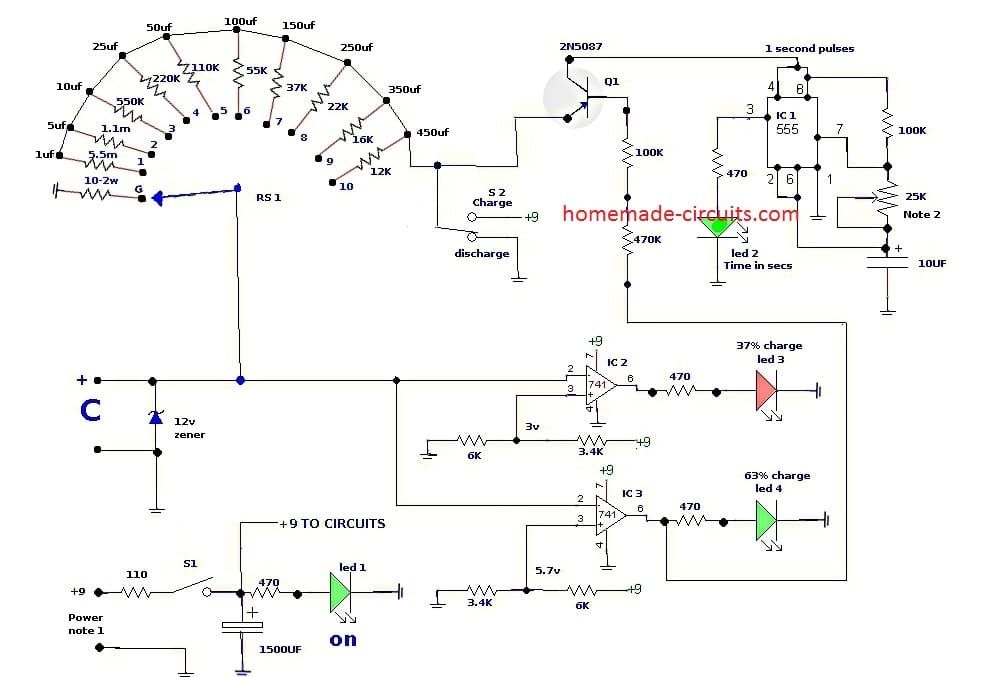
In de bovenstaande afbeelding kunnen we een ontwerp visualiseren voor het implementeren van de voorgestelde achterwaartse voorwaartse beweging van een incubatormotor na een vooraf bepaald tijdsinterval.
Op het moment dat de stroom wordt ingeschakeld, hebben we het volgende scenario:
De magnetische schakelaar voor 'set' kan worden verondersteld zich in een gedeactiveerde toestand te bevinden of is ingedrukt terwijl de motor of het ontworpen incubatormechanisme zich in de nulstartpositie bevindt.
Houd er rekening mee dat bij voorkeur de 'set' / 'reset'-schakelaars worden geïmplementeerd met behulp van magnetische reed-schakelaars.
Als de stroom is ingeschakeld, wordt IC 4060 gereset via C2, zodat het het telproces vanaf nul start en pin3 een nullogica krijgt.
Deze aanvankelijke nullogica wordt via C3 naar de basis van T1 gevoerd, die onmiddellijk T3 en het bijbehorende relais dwingt om te activeren. R7 in het proces zorgt ervoor dat T1 / T3 in deze modus wordt vergrendeld.
Het DPDT-relais wordt op dit punt geactiveerd bij zijn maakcontacten en start de motor en het mechanisme in de richting van een veronderstelde 'voorwaartse' beweging.
Zodra de motor begint te bewegen, wordt de 'set'-knop losgelaten zodat T4 en de bovenste SPDT de gelegenheid krijgen om te activeren, waarbij het SPDT-relais een N / O-positie-omschakeling bereikt waardoor de N / C-contacten van de DPDT met een stand-by levering..
De motor en / of het mechanisme blijft in beweging totdat deze de 'reset'-positie heeft bereikt, waardoor T2 de T1 / T4-vergrendeling activeert en verbreekt.
Als de T4 is uitgeschakeld, verandert het DPDT-relais van positie van N / O naar N / C en biedt het een tegengestelde (omgekeerde) beweging aan het motormechanisme.
Het motormechanisme van de broedmachine draait nu van richting en initieert een omgekeerde beweging totdat het het 'set'-punt heeft bereikt dat snel de basisaandrijving van de T4 UITschakelt, de SPDT schakelt de snijkracht van de DPDT UIT en het hele mechanisme komt tot stilstand .
In de tussentijd gaat de IC 4060 door met tellen totdat hij opnieuw een nullogica heeft geproduceerd na door een hoge logica op pin3 te zijn gegaan (door C3 te ontladen).
De cyclus wordt opnieuw gestart en herhaalt de procedure zoals hierboven uitgelegd.
Vorige: Knipperende LED met Arduino - Volledige zelfstudie Volgende: Krachtige industriële overspanningsbeveiliging onderzocht