Het gepresenteerde 3-fasen VFD-circuit ( ontworpen door mij ) kan worden gebruikt voor het regelen van de snelheid van elke driefasige brushed AC-motor of zelfs een borstelloze AC-motor. Het idee werd aangevraagd door de heer Tom
Met behulp van de VFD
Het voorgestelde driefasige VFD-circuit kan universeel worden toegepast voor de meeste driefasige AC-motoren waarbij de efficiëntie van de regeling niet te kritisch is.
Het kan specifiek worden gebruikt voor besturing eekhoornkooi inductiemotor snelheid met een open lus-modus, en mogelijk ook in de gesloten-lus-modus die in het latere deel van het artikel zal worden besproken.
Modules vereist voor driefasige omvormer
Voor het ontwerpen van het voorgestelde driefasige VFD- of aandrijfcircuit met variabele frequentie zijn in wezen de volgende fundamentele circuittrappen vereist:
- PWM-circuit van de spanningsregelaar
- 3-fase H-brug stuurcircuit hoge zijde / lage zijde
- 3-fasen generatorcircuit
- Spanning naar frequentieomvormercircuit voor het genereren van V / Hz-parameter.
Laten we de functionerende details van de bovenstaande fasen leren met behulp van de volgende uitleg:
Een eenvoudig PWM-spanningsregelaarcircuit is te zien in het onderstaande diagram:

De PWM-controller
Ik heb de werking van de bovenstaande PWM-generatortrap al opgenomen en uitgelegd, die in feite is ontworpen voor het genereren van een variërende PWM-uitvoer over pin3 van IC2 als reactie op het potentieel dat wordt toegepast op pin5 van hetzelfde IC.
De 1K-preset die in het diagram wordt getoond, is de RMS-regelknop, die op de juiste manier kan worden aangepast voor het verkrijgen van de gewenste proportionele hoeveelheid uitgangsspanning in de vorm van PWM's op pin3 van IC2 voor verdere verwerking. Dit is ingesteld om een corresponderende output te produceren die equivalent kan zijn aan de netspanning van 220V of 120V AC RMS.
Het H-Bridge Driver Circuit
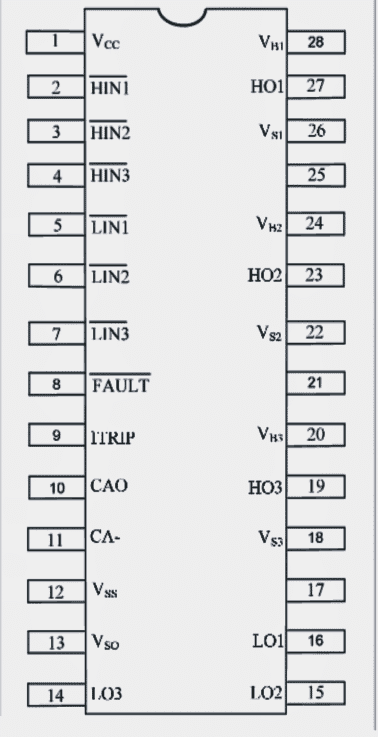
Het volgende diagram hieronder toont een H-brug driefasig stuurcircuit met één chip met behulp van de IC IRS2330.
Het ontwerp ziet er eenvoudig uit, aangezien de meeste complexiteit wordt afgehandeld door de ingebouwde geavanceerde schakelingen van de chips.
Een goed berekend driefasensignaal wordt aangelegd over de HIN1 / 2/3 en LIN1 / 2/3 ingangen van de IC via een driefasige signaalgeneratortrap.
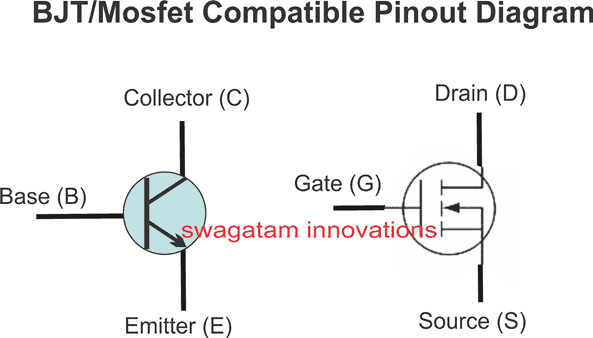
De outputs van de IC IRS2330 kan worden gezien geïntegreerd met 6 mosfets of IGBTs-brugnetwerk, waarvan de afvoeren op de juiste manier zijn geconfigureerd met de motor die moet worden bestuurd.
De low-side mosfet / IGBT-poorten zijn geïntegreerd met de IC2-pin # 3 van de hierboven besproken PWM-generatorcircuitfase voor het initiëren van de PWM-injectie in de bridge-mosfet-fase. Deze regeling helpt de motor uiteindelijk om de gewenste snelheid te verkrijgen volgens de instellingen (via de 1 k preset in het eerste diagram).

In het volgende diagram visualiseren we het vereiste 3-fasen signaalgeneratorcircuit.

Het 3-fasen generatorcircuit configureren
De driefasige generator is opgebouwd rond een paar CMOS-chips CD4035 en CD4009 die nauwkeurig gedimensioneerde driefasensignalen genereren over de getoonde pinouts.
De frequentie van de 3 fasen signalen hangt af van de gevoede ingangsklokken die 6 keer het beoogde 3 fasen signaal zouden moeten zijn. Dit betekent dat als de vereiste driefasige frequentie 50 Hz is, de ingangsklok 50 x 6 = 300 Hz moet zijn.
Het impliceert ook dat de bovenstaande klokken kunnen worden gevarieerd om de effectieve frequentie van de aandrijf-IC te variëren, die op zijn beurt verantwoordelijk zou zijn voor het variëren van de operationele frequentie van de motor.
Aangezien de bovengenoemde frequentiewijziging echter automatisch moet plaatsvinden in reactie op de variërende spanning, wordt een spanning-naar-frequentieomvormer essentieel. De volgende fase bespreekt een eenvoudige nauwkeurige spanning-naar-frequentieomzettercircuit voor de vereiste implementatie.
Hoe u een constante V / F-verhouding creëert
Typisch in inductiemotoren, om een optimale efficiëntie van de motorsnelheid en het koppel te behouden, moet de slipsnelheid of de rotorsnelheid worden geregeld, wat op zijn beurt mogelijk wordt door een constante V / Hz-verhouding te handhaven. Omdat de magnetische flux van de stator altijd constant is, ongeacht de voedingsfrequentie van de ingang, wordt de rotorsnelheid gemakkelijk regelbaar door handhaving van de V / Hz-verhouding constant
In een open-lusmodus kan dit grofweg worden gedaan door vooraf bepaalde V / Hz-verhoudingen te behouden en deze handmatig te implementeren. In het eerste diagram kan dit bijvoorbeeld worden gedaan door de R1 en de 1K preset aan te passen. R1 bepaalt de frequentie en de 1K past de RMS van de output aan, daarom kunnen we door de twee parameters op de juiste manier aan te passen de vereiste hoeveelheid V / Hz handmatig afdwingen.
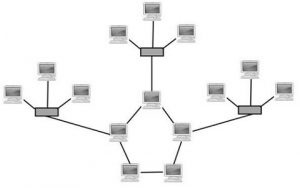
Om echter een relatief nauwkeurige regeling van het koppel en de snelheid van een inductiemotor te krijgen, moeten we een gesloten-lusstrategie implementeren, waarbij de slipsnelheidgegevens naar het verwerkingscircuit moeten worden gevoerd voor een automatische aanpassing van de V / Hz-verhouding, zodat dit waarde blijft altijd ongeveer constant.
Implementeren van de Closed Loop Feedback
Het eerste diagram op deze pagina kan op geschikte wijze worden aangepast voor het ontwerpen van de automatische V / Hz-regeling met gesloten lus, zoals hieronder weergegeven:

In de bovenstaande afbeelding bepaalt de potentiaal op pin # 5 van IC2 de breedte van de SPWM die wordt gegenereerd op pin # 3 van dezelfde IC. De SPWM worden gegenereerd door het 12 V-rimpelmonster van het net op pin # 5 te vergelijken met de driehoekige golf op pin # 7 van IC2, en dit wordt naar de lage zij-mosfets gevoerd voor de motorbesturing.
Aanvankelijk is deze SPWM ingesteld op een aangepast niveau (met behulp van 1K perset), waardoor de IGBT-poorten aan de lage kant van de driefasige brug worden geactiveerd voor het initiëren van de rotorbeweging op het gespecificeerde nominale snelheidsniveau.
Zodra de rotorrotor begint te draaien, zorgt de aangesloten toerenteller met het rotormechanisme ervoor dat er een evenredige extra hoeveelheid spanning ontstaat op pin # 5 van IC2, dit zorgt er proportioneel voor dat de SPWM's breder worden waardoor er meer spanning naar de statorspoelen van de motor komt. Dit veroorzaakt een verdere toename van de rotorsnelheid waardoor er meer spanning op pin # 5 van IC2 komt, en dit gaat door totdat de SPWM-equivalente spanning niet langer kan stijgen en de synchronisatie van de statorrotor een stabiele toestand bereikt.
De bovenstaande procedure gaat door met zelfaanpassing gedurende de hele bedrijfsperiode van de motor.
Hoe de toerenteller te maken en te integreren
Een eenvoudig tachometerontwerp is te zien in het volgende diagram, dit zou kunnen worden geïntegreerd met het rotormechanisme, zodat de rotatiefrequentie de basis van de BC547 kan voeden.

Hier worden de rotorsnelheidgegevens verzameld van een hall-effectsensor of een IR LED / sensornetwerk en naar de basis van T1 gestuurd.
T1 oscilleert op deze frequentie en activeert het tachometerschakeling gemaakt door een geschikte configuratie van een IC 555 monostabiel circuit.
De output van de bovenstaande tachometer varieert proportioneel in reactie op de inputfrequentie aan de basis van T1.
Naarmate de frequentie stijgt, stijgt de spanning aan de extreemrechtse D3-uitgang ook en vice versa, en helpt het om de V / Hz-verhouding op een relatief constant niveau te houden.
Snelheid regelen
Het toerental van de motor met constante V / F kan worden bereikt door de frequentie-ingang op de klokingang van IC 4035 te wijzigen. Dit kan worden bereikt door een variabele frequentie van een IC 555 astabiel circuit of een standaard astabiel circuit naar de klokingang van IC 4035.
Het veranderen van de frequentie verandert effectief de werkfrequentie van de motor, waardoor de slipsnelheid dienovereenkomstig wordt verlaagd.
Dit wordt gedetecteerd door de toerenteller en de toerenteller verlaagt proportioneel het potentieel op pin # 5 van de IC2, wat op zijn beurt het SPWM-gehalte op de motor proportioneel verlaagt, en dientengevolge wordt de spanning voor de motor verlaagd, waardoor variatie van de motorsnelheid met de juiste vereiste V / F-verhouding.
Een zelfgemaakte V naar F-converter

In het bovenstaande spanning-naar-frequentie-omzetcircuit wordt een IC 4060 gebruikt en de frequentieafhankelijke weerstand wordt beïnvloed door een LED / LDR-assemblage voor de beoogde omzettingen.
De LED / LDR-assemblage is verzegeld in een lichtdichte doos en de LDR is gepositioneerd over een 1M frequentieafhankelijke weerstand van de IC.
Omdat de LDR / LDR-respons redelijk lineair is, genereert de variërende verlichting van de LED op de LDR een proportioneel variërende (toenemende of afnemende) frequentie over pin3 van de IC.
De FSD of het V / Hz-bereik van de trap kan worden ingesteld door de 1M-weerstand of zelfs de C1-waarde op de juiste manier in te stellen.
De LED is de spanning die wordt afgeleid en verlicht via de PWM's van de eerste PWM-circuitfase. Het impliceert dat als de PWM's variëren, de LED-verlichting ook zal variëren, wat op zijn beurt zou leiden tot een proportioneel toenemende of afnemende frequentie op pin3 van de IC 4060 in het bovenstaande diagram.
Integratie van de converter met VFD
Deze variërende frequentie van de IC 4060 moet nu gewoon worden geïntegreerd met de 3-fase generator IC CD4035 klokingang.
De bovenstaande fasen vormen de belangrijkste ingrediënten voor het maken van een driefasig VFD-circuit.
Nu zou het belangrijk zijn om te discussiëren over de DC-bus die nodig is voor het leveren van de IGBT-motorcontrollers en de opstartprocedures voor het hele ontwerp.
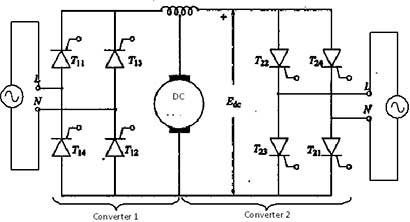
De DC-bus die over de IGBT H-bridge-rails wordt toegepast, kan worden verkregen door de beschikbare driefasige netvoeding te corrigeren met behulp van de volgende circuitconfiguratie. De IGBT DC BUS-rails zijn verbonden over de punten die zijn aangegeven als 'belasting'

Voor een enkelfasige bron kan de gelijkrichting worden geïmplementeerd met behulp van een standaard 4 diodebrugnetwerkconfiguratie.
Hoe het voorgestelde 3-fasen VFD-circuit in te stellen
Het kan worden gedaan volgens de volgende instructies:
Na het toepassen van de DC-busspanning over de IGBT's (zonder dat de motor is aangesloten), past u de PWM 1k-preset aan totdat de spanning over de rails gelijk wordt aan de beoogde motorspanningsspecificaties.
Pas vervolgens de IC 4060 1M-preset aan om een van de IC IRS2330-ingangen in te stellen op het vereiste correcte frequentieniveau volgens de gegeven motorspecificaties.
Nadat de bovenstaande procedures zijn voltooid, kan de gespecificeerde motor worden aangesloten en voorzien van verschillende spanningsniveaus, V / Hz-parameter en worden bevestigd voor een automatische V / Hz-werking via de aangesloten motor.
Vorige: Hoe een kweeklichtcircuit te bouwen Volgende: Wateronthardercircuit onderzocht