In dit tijdperk van industriële automatie worden robots gebruikt voor het afhandelen van verschillende processen voor een nauwkeurige en betere productiekwaliteit. Het kiezen van de ideale motor voor een perfecte robot is altijd een zware taak bij het ontwerpen van de robot, speciaal voor industrieën. Juiste selectie van elektrische motoren in industriële robots vereist verschillende parameters om rekening te houden met armcontrole, positie, hoek- en lineaire bewegingen.

Motoren gebruikt in industriële robotica
Motorselectie is het minst begrepen concept voor robotica-hobbyisten die strategieën en serieuze analyses vereisen. Het gaat om het bepalen van robotsnelheid, acceleratie, koppelvereisten op basis van robotgewicht, wielmaat en toepassing waar het moet worden geïmplementeerd. Er zijn veel soorten motoren zijn beschikbaar in de huidige markt, maar meestal Tiny pager-motoren, servomotoren , lineaire motoren, stappenmotoren en DC-motorreductoren worden gebruikt in industriële robots op basis van hun toepassingsgebied.
Onjuiste selectie van de motor resulteert in een gehandicapte robot, dus welk type motor is het beste en geschikt om industriële robots echt, nauwkeurig en voldoende te maken om aan alle industriële procesbehoeften te voldoen, terwijl alle realistische specificaties in gedachten worden gehouden?
Hier hebben we enkele inzichten over deze motor verzameld van industriële professionals voor het kiezen van de juiste motor voor industriële toepassingen.
We moedigen u aan om de meningen te volgen van experts die ernaar streven de beste motoren voor industriële robotica te leveren met beschikbare DC-, stappen-, borstelloze en servomotoren voor nauwkeurige, kosteneffectieve en betrouwbare bewegingen van de robot.
Ch.Sampath Kumar
M.tech in VLSI-ontwerp
Schrijver van technische inhoud
 Gelijkstroommotoren zijn beschikbaar in een breed bereik voor continu gebruik, maar het vereist reductie van de tandwieloverbrenging voor de overeenkomstige toepassing. Stappenmotor vereist geen tandwielreductie, omdat de getrapte werking een lage snelheid biedt voor specifieke toepassingen. Eindelijk worden servomotoren gebruikt voor nauwkeurige en nauwkeurige regeling die wordt geïmplementeerd in gesloten-lusoperaties. Maar het vereist extra feedback en stuurcircuits, dus het is duurder dan gelijkstroom en stappenmotor. Dus de servomotoren maken de robot betrouwbaarder vanwege zijn precieze beweging.
Gelijkstroommotoren zijn beschikbaar in een breed bereik voor continu gebruik, maar het vereist reductie van de tandwieloverbrenging voor de overeenkomstige toepassing. Stappenmotor vereist geen tandwielreductie, omdat de getrapte werking een lage snelheid biedt voor specifieke toepassingen. Eindelijk worden servomotoren gebruikt voor nauwkeurige en nauwkeurige regeling die wordt geïmplementeerd in gesloten-lusoperaties. Maar het vereist extra feedback en stuurcircuits, dus het is duurder dan gelijkstroom en stappenmotor. Dus de servomotoren maken de robot betrouwbaarder vanwege zijn precieze beweging.
Viswanath Prathap
M.Tech in elektrische energietechniek
Schrijver van technische inhoud

Kies en plaats Robots worden doorgaans in industrieën aangetroffen om een object uit de ene positie of plaats te kiezen en het op een andere positie of plaats te plaatsen. Hiervoor moeten hoekbewegingen van gewrichten van de robots worden gestuurd, wat kan worden bereikt met behulp van servomotoren. Deze servomotoren worden bestuurd met behulp van PWM-gegevens die door de robotbesturing worden verstrekt voor het bedienen van de gewrichten van robots. Servomotoren zijn in staat om voldoende koppel te genereren om een object snel uit de stilstand te verplaatsen. Deze worden dus gebruikt als wielen in militaire en industriële robotvoertuigen. Stappenmotoren kunnen ook worden gebruikt voor het regelen van de positie, maar deze zullen zelfs in de rustperiode stroom verbruiken voor het vergrendelen en vasthouden van de opgedragen positie. Servomotoren worden dus meestal gebruikt in industriële robotica als een krachtige vervanging voor de stappenmotoren.
S. Naresh Reddy
M.tech in ingebed systeem
Project gids
De structuur van mechanische robot moet worden gecontroleerd om perfo  rm taak. Er zijn drie verschillende fasen om de robot te besturen, zoals perceptie, verwerking en actie. Sensoren geven de informatie over de positie van zijn gewrichten en zijn eindeffector aan de robot, vervolgens wordt deze informatie verwerkt naar de besturingseenheid en berekenen het juiste signaal naar de motor die mechanisch beweegt. De overgrote meerderheid van robots maakt gebruik van elektromotoren. Herhaaldelijk borstelloze en geborstelde DC-motoren worden gebruikt in draagbare robots en AC-motoren worden gebruikt in industriële robots. Deze motoren hebben de voorkeur in systemen met lichtere belastingen, en waar de overheersende vorm van beweging roterend is.
rm taak. Er zijn drie verschillende fasen om de robot te besturen, zoals perceptie, verwerking en actie. Sensoren geven de informatie over de positie van zijn gewrichten en zijn eindeffector aan de robot, vervolgens wordt deze informatie verwerkt naar de besturingseenheid en berekenen het juiste signaal naar de motor die mechanisch beweegt. De overgrote meerderheid van robots maakt gebruik van elektromotoren. Herhaaldelijk borstelloze en geborstelde DC-motoren worden gebruikt in draagbare robots en AC-motoren worden gebruikt in industriële robots. Deze motoren hebben de voorkeur in systemen met lichtere belastingen, en waar de overheersende vorm van beweging roterend is.
Suresh Megaji
M. Tech in draadloze communicatiesystemen
Schrijver van technische inhoud

Als je betrokken wilt zijn bij ‘robotica’ en hun toepassing op ‘industrie’, moet je kennis hebben van ‘motoren’ die in robotica worden gebruikt, omdat robotica meestal afhankelijk is van motoren. ‘Robotmachines’ worden in feite gebruikt voor verschillende toepassingen in de productie. Verschillende ‘motoren’ zoals DC, Pulsed, Stepper, Optische drive, Partial Turn en Hall-effectmotoren, enz ... worden gebruikt met sommige technieken om ze in de industrie toe te passen en ze vriendelijk te maken, zoals
- DC-motoren worden gebruikt voor batterijgeoriënteerde toepassingen, langzamere snelheden, mobiliteitstoepassingen.
- Overal waar we een rotatiegerichte toepassing nodig hebben, kunnen we stappenmotoren gebruiken zoals unipolaire en bipolaire motoren.
- Voor hoofd- en armbewegingen kunnen we motoren met gedeeltelijke draaiing gebruiken.
- Als we magnetische velden willen gebruiken, kunnen we Hall-effect en optische aandrijfmotoren enz. Gebruiken.
Door robotica in te zetten die slimme motoren gebruikt, kunnen we geld, tijd, ruimte, gevaarlijke bewegingen etc. besparen.
Ajay Sahare
Marketing Executive

Industriële robots worden gebruikt in een industriële productieomgeving. Dit zijn de armen die speciaal zijn ontwikkeld voor toepassingen als lassen, materiaalbehandeling, schilderen en andere.
Niet elk mechatronisch apparaat dat in een industriële omgeving wordt gebruikt, kan als een robot worden beschouwd. Zoals gedefinieerd door ISO (International Standards Organization) wordt een automatisch gestuurde, herprogrammeerbare, multifunctionele manipulator die in drie of meer assen kan worden geprogrammeerd, beschouwd als een industriële robot.
Motoren die worden gebruikt in industriële robotica zijn
- Wisselstroom (AC) motoren
- Gelijkstroom (DC) motoren
- Servomotoren
- Stappenmotoren.
1. Wisselstroommotoren kunnen verder worden onderverdeeld in asynchrone en synchrone typen. Een inductie-AC-motor is bijvoorbeeld een asynchrone eenheid die in wezen bestaat uit een draadgewonden stator en een rotor. Stroom is verbonden met de draad en wisselstroom die erdoorheen stroomt, induceert een elektromagnetisch (EM) veld in de opgerolde draad, waarbij een veld dat sterk genoeg is de kracht levert voor de beweging van de rotor. Synchrone motoren zijn motoren met een constant toerental die synchroon werken met de AC-lijnfrequentie en worden vaak gebruikt waar een nauwkeurige constante snelheid vereist is.
2. Veel industriële toepassingen, waaronder robotica, maken vaak gebruik van DC-motoren vanwege het gemak waarmee snelheid en richting kunnen worden geregeld. Ze zijn in staat tot een oneindig snelheidsbereik, van volle snelheid tot nul, met een breed scala aan belastingen.
Omdat DC-motoren een hoge verhouding tussen koppel en traagheid hebben, kunnen ze snel reageren op veranderingen in stuursignalen. Een gelijkstroommotor kan soepel worden geregeld tot nul beweging en onmiddellijk in de tegenovergestelde richting worden versneld zonder de noodzaak van complexe stroomschakelcircuits. Borstelloze gelijkstroommotoren met permanente magneet zijn meestal duurder dan borsteltypes, hoewel ze voordelen kunnen bieden op het gebied van stroomverbruik en betrouwbaarheid.
Zonder commutator kunnen borstelloze motoren efficiënter en met hogere snelheden werken dan conventionele DC-motoren. De meeste borstelloze gelijkstroommotoren werken op een trapeziumvormige wisselstroomgolfvorm, maar sommige motoren werken met sinusgolven. Sinusgolf aangedreven borstelloze motoren kunnen een soepele werking en lagere snelheden bereiken met een lage koppelrimpel, waardoor ze ideaal zijn voor slijpen, coaten en andere toepassingen zoals oppervlakteafwerking.
Als u in het geval van Brushed DC-motoren wilt dat uw motor langzamer draait zonder vermogen te verliezen, kunt u pulsbreedtemodulatie (PWM) gebruiken. Dit betekent in feite dat de motor zeer snel in- en uitgeschakeld moet worden. Op deze manier draait de motor met een lagere snelheid alsof er een lagere spanning zou worden toegepast zonder voor het vermogen te zorgen.
Kortom, het koppel dat wordt gegenereerd door een geborstelde gelijkstroommotor is te klein en de snelheid is te groot om bruikbaar te zijn. Versnellingsreducties worden dus meestal gebruikt om de snelheid te verlagen en het koppel te verhogen.
3. Servomotoren worden gebruikt in systemen met een gesloten lus met een digitale controller. De controller stuurt snelheidsopdrachten naar een stuurversterker, die op zijn beurt de servomotor voedt. Een vorm van feedbackapparaat, zoals een resolver of encoder, geeft informatie over de positie en snelheid van de servomotor. De resolver of encoder kan in de motor zijn geïntegreerd of op afstand zijn geplaatst. Door het gesloten-lussysteem kan een servomotor werken met een specifiek bewegingsprofiel dat in de controller is geprogrammeerd.
4. Stappenmotoren kunnen met of zonder feedback werken, waarbij de rotatie van de motor wordt opgesplitst in kleine hoekstappen. Het wordt bestuurd door gepulseerde commandosignalen en kan precies op een bepaald punt stoppen zonder dat remmen of koppelingen nodig zijn. Wanneer de stroom wordt uitgeschakeld, blijft een stappenmotor met permanente magneten over het algemeen in zijn laatste positie. Meerdere stappenmotoren kunnen in synchronisatie worden gehouden door ze vanuit een gemeenschappelijke bron aan te drijven.
Dev desai
Marketing Executive 
Als u van plan bent betrokken te raken bij robotica, moet u vertrouwd raken met de vele soorten motoren die beschikbaar zijn. Alle robotbewegingen worden op de een of andere manier gemotoriseerd, dus het is belangrijk om te weten wat uw optie is.
DC-motoren
Behalve dat hij op batterijen werkt, wordt de bewegingsrichting van een DC-motor bepaald door de polariteit van het opgenomen vermogen. Dit is een absolute noodzaak voor robotfuncties. Gelukkig is dit type motor verkrijgbaar in een grote verscheidenheid aan maten, spanningsvereisten en is het overal verkrijgbaar.
De verschillende soorten motoren zijn zoals hieronder
- Mobiliteit basismotor
- Hobbymotor met hoge snelheid
- Motor met riemaandrijving
- Slot auto motor
- Puls bediend
- Arm aangepaste motor
- Bipolaire stepper met wijzer
Bio Motor
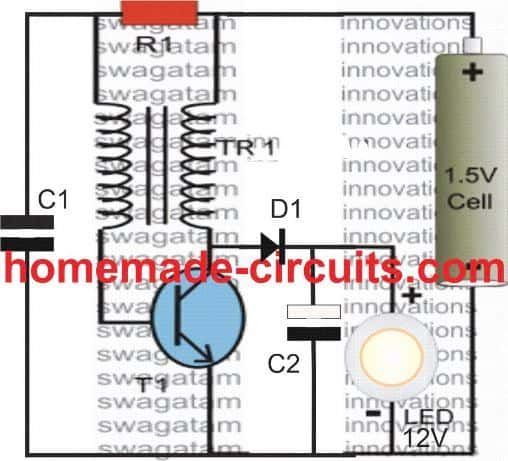
Bio-metaal is een geweldige stof die al een paar jaar bestaat en die een aantal toepassingen kent op het gebied van robotica. We kunnen in de afbeelding zien dat een stuk bio-metaaldraad met vijf procent van zijn lengte krimpt als er maar een paar volt overheen wordt geleid. Na jaren van testen is bio-draad sterk en betrouwbaar gebleken en wordt het steeds bruikbaarder naarmate er nieuwe producten op de markt komen. De iets langzamere reactietijd maakt het ideaal voor robotarm- en handtoepassingen, waar schokkerigheid problematisch zou zijn. Een lang stuk draad kan een aanzienlijke beweging produceren wanneer het over de hele lengte van een robotarm wordt gestrekt. Er zijn momenteel robotarmkits op de commerciële markt die het biometaal gebruiken.
Relais
Het relais wordt in robotica bijna altijd gebruikt om het vermogen dat bedoeld is voor motoren te isoleren, van de voeding voor computerfuncties. Motoren stellen vanwege hun lage impedantie hoge stroomvereisten aan voedingen en creëren meerdere storingen die computers niet kunnen verdragen. Het is daarom een goed idee om alleen voor motoren een aparte hoogstroombron te gebruiken.
Solenoïden
Solenoïden kunnen het beste worden gebruikt als bedieningsapparatuur voor manipulatoren of als schakeloperatoren. Hun beweging is snel en sterk, dus een veer wordt bijna altijd gebruikt in grijpers om de actie te verzachten. Zoals u in de afbeelding kunt zien, worden bedieningsdraden gebruikt om de grijper te sluiten. Deze stuurkabels kunnen ook dienst doen als retourveren. Grijpers zoals deze worden meer aangetroffen in productielijnwerk waar de taak zeer afgemeten is en nauwe parameters omvat.
Secundaire functies
De meeste motorische functies omvatten mobiliteit, arm, hoofd of een andere zichtbare externe beweging, maar sommige motorische bewegingen zijn niet zo zichtbaar. Grote industriële robots gebruiken hydraulische systemen die pompmotoren gebruiken om een werkdruk van een hydraulische vloeistof te produceren. Een andere belangrijke secundaire functie van de motoren is de gecontroleerde afstelling. Om de nauwkeurigheid te verbeteren, zijn potentiometers die op motoren zijn aangesloten, meestal multi-turn-apparaten.
Gevolgtrekking
Robots kunnen zeer complexe apparaten zijn die een grote verscheidenheid aan motorisch aangedreven bewegingen vereisen. Dit artikel is bedoeld om een overzicht te geven van het scala aan apparaten waarmee u mogelijk te maken heeft als robotbouwer. Het zou een goed idee zijn om te beginnen met onderzoek naar leveranciers van robotapparatuur en beschikbare benodigdheden. Er is momenteel een enorme hoeveelheid producten beschikbaar en dankzij internet is het gemakkelijk te vinden, te leren kennen en te gebruiken. Wat uw behoeften ook zijn, een beetje vindingrijkheid en de vastberadenheid die alle robotbouwers lijken te hebben, zouden u goed van dienst moeten zijn.
Samadan Wandre
Marketing Executive
'Motoren gebruikt in robotica'
- Mobiliteit basismotor

- Hobbymotor met hoge snelheid
- Motor met riemaandrijving
- Slot auto motor
- Puls bediend
- Arm aangepaste motor
- Bipolaire stepper met wijzer

Grotere motoren zijn het meest geschikt voor mobiliteitsbases waarmee robots het terrein kunnen manoeuvreren. Sommige van deze motoren worden geleverd met versnellingsbakken om de lagere snelheid en koppel te produceren die nodig zijn voor mobiliteit. Het verlagen van de spanning naar een motor kan deze ook vertragen tot een meer wenselijke snelheid. Alleen experimenten kunnen bepalen of uw motor zal werken met een lagere spanning. Als dit het geval is, heeft u uzelf veel moeite bespaard, zo niet, dan zijn er andere manieren om motoren te vertragen. Sommige hogesnelheidsmotoren kunnen worden gebruikt als wormwieloverbrengingen of schroeftandwielen worden gebruikt.
Een voorbeeld van het schroeftandwiel is te zien in de afbeelding van de robotarm. Als de motor met de klok mee draait, wordt de boutsamenstelling naar de motor getrokken en de arm trekt samen en als deze tegen de klok in draait, schuift de arm uit. Hoewel de motoras snel draait, is de armactie aanzienlijk langzamer vanwege de schroefreductie.In deze volgende illustratie van het motorcircuit zien we een DC-motor die wordt bestuurd door een vermogenstransistor. Een relaisschakelaar (Double Pole Double Throw) bepaalt de richting. Transistor Q1 zou een vermogenstransistor moeten zijn om de zware belasting van een motor te kunnen dragen.
Gepulseerde motoren
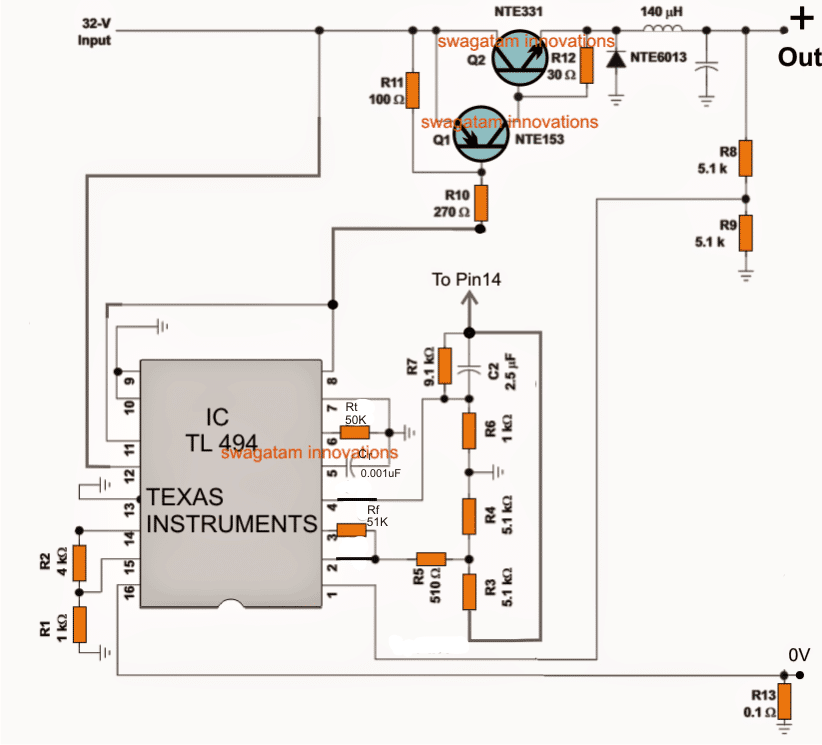
Sommige motoren leiden een snelheidsreductie af door te werken op basis van een gepulseerd DC-signaal. Dit signaal is meestal ongeveer honderd Hz. De snelheid van de motor kan worden gewijzigd door de pulsbreedte te veranderen, niet door de frequentie van de puls te veranderen. Dergelijke motoren zijn te vinden in overtollige elektronicawinkels en kunnen gemakkelijk worden geïdentificeerd door de pulsgenerator die erop is aangesloten. Elke DC-motor kan echter worden aangedreven door een pulsbron, en een schema van een dergelijk circuit is bijgevoegd.
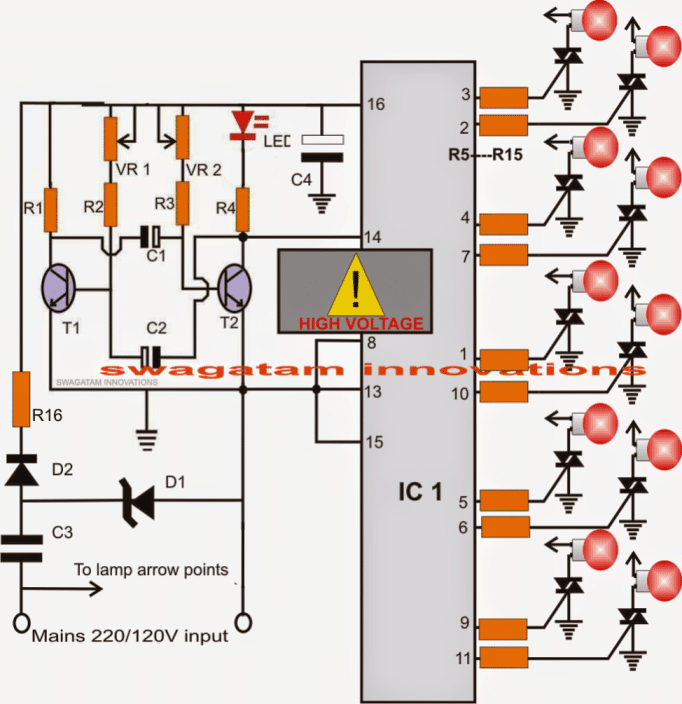
Zoals je kunt zien, is gekozen voor een 555-timer als aandrijfoscillator, die een frequentie van ongeveer 100 Hz produceert. Weerstand R1 en condensator C stabiliseren en isoleren de pulsgenerator van de pieken die door de motor worden geproduceerd. Aangezien dit apparaat kan putten uit een voeding van 6 tot 12 volt, wilt u misschien de waarde van condensator C4 en C6 wijzigen voor betere resultaten, afhankelijk van het voltage dat u gebruikt. De pulsuitvoer wordt van pin drie van IC1 gehaald en naar pin twee van IC2, ook een 555-timer, gevoerd.
De tweede timer varieert de breedte van de puls door de spanning aan te passen die via potentiometer R5 en weerstand R6 naar condensator C6 wordt gevoerd. De duur van de puls bepaalt de snelheid van de motor en de pulsbreedte kan worden aangepast van 10% tot 100%.
Transistor Q1 ontvangt het pulsbreedte-gemoduleerde signaal via weerstand R7. Omdat Q1 een apparaat met lage stroomsterkte is, geeft het het signaal door aan Q2, een vermogenstransistor die de huidige eisen van de motor aankan. Deze transistors zijn niet kritisch en bijna elk type laagstroom-vermogenstransistor zal werken. Het relais bepaalt in welke richting de motor zal gaan.
Stappenmotoren
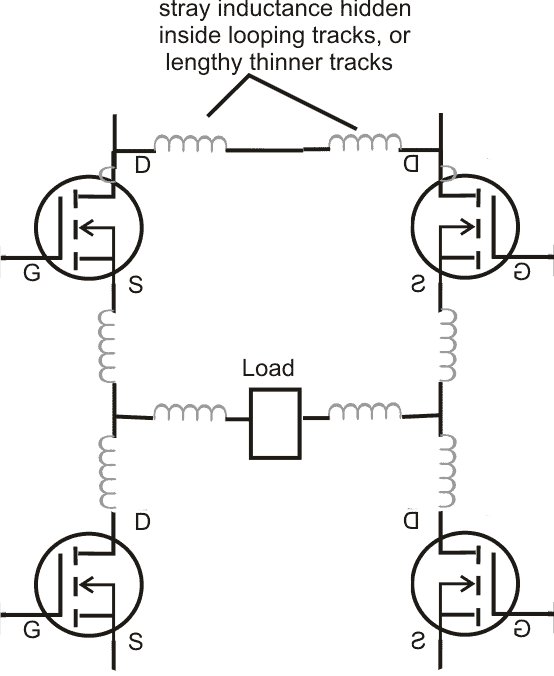
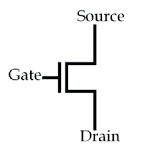
De meest complexe van alle motoren is de stappenmotor. Zoals de naam al aangeeft, draait de motor in stappen van graden en wordt hij pulsgestuurd. De exacte mate van draaiing per stap kan per fabrikant of model verschillen, maar 20 graden is populair en levert 18 stappen voor één volledige draai. Er zijn twee basistypen stappenmotoren, bipolair en unipolair. Zoals je kunt zien in het stappenmotor-schema, is de bipolaire motor gewoon een motor met twee spoelen.
Het unipolaire type is twee spoelen met middenkranen. Als de middelste kranen worden genegeerd, kan de unipolaire motor werken als een bipolair type. De twee spoelen in een stappenmotor krijgen afwisselend stappulsen in polariteit van spoel naar spoel. Een kaart van dit proces wordt gegeven in het werkdiagram om de motorische actie grafisch weer te geven. In tegenstelling tot conventionele DC-motoren neemt het koppel af met de snelheid. Er is ook een speciaal type aandrijfeenheid nodig om de stappenmotor vooruit te helpen en deze moet bij de motor worden geleverd. Het wordt niet aanbevolen om een besturingseenheid te bouwen, tenzij de motor wordt geleverd met een goed specificatieblad met aanbevelingen voor onderdelen en een volledig schema.
De motor heeft mogelijk buffers nodig om hem van het aandrijfsysteem te scheiden, of hij heeft mogelijk een aparte voeding nodig. Wat de behoeften ook zijn, ze kunnen aanzienlijk verschillen van motor tot motor. Hobbywinkels zijn de meest betrouwbare leveranciers van stappenmotoren, en hoewel overtollige elektronicawinkels deze af en toe hebben, bevatten ze mogelijk niet de nodige specificatie-informatie
Motoren met gedeeltelijke draaiing
Sommige robotfuncties vereisen slechts een gedeeltelijke draai, zoals hoofd- of armbewegingen. De eenvoudigste manier om dit te bereiken is met positiestops en slipversnellingen. Een illustratie van de mechanische details van dit type motor wordt hierboven gegeven. Microschakelaars kunnen worden gebruikt als stopsensoren om de stroom uit te schakelen en de richting voor de volgende actie opnieuw in te stellen.
Het onderste wiel is verbonden met de motor terwijl het bovenste wiel is gescheiden van het onderste wiel door een rond stuk vilt. Als het onderste wiel draait, draait het bovenste wiel mee totdat de aanslagpen in contact komt met de microschakelaar. Sommige ontwerpen voorzien niet in het stoppen van de motor, dus eenvoudige schroeven met afstandhouders zullen functioneren als motorstops.
Bio-motor
Bio-metaal is een geweldige stof die al een paar jaar bestaat en die een aantal toepassingen kent op het gebied van robotica. We kunnen in de afbeelding zien dat een stuk bio-metaaldraad met vijf procent van zijn lengte krimpt als er maar een paar volt overheen wordt geleid. Na jaren van testen is bio-draad sterk en betrouwbaar gebleken en wordt het steeds bruikbaarder naarmate er nieuwe producten op de markt komen. De iets langzamere reactietijd maakt het ideaal voor robotarm- en handtoepassingen, waar schokkerigheid problematisch zou zijn. Een lang stuk draad kan een aanzienlijke beweging produceren wanneer het over de hele lengte van een robotarm wordt gestrekt. Er zijn momenteel robotarmkits op de commerciële markt die het biometaal gebruiken.
Bhaskar Singh
Marketing Executive
 Industriële robots zijn apparaten die tot op zekere hoogte menselijke bewegingen dupliceren en tegelijkertijd het gevaar verminderen, waardoor ze meer kracht, nauwkeurigheid en continuïteit bieden. Ze hebben een breed scala aan motorisch aangedreven bewegingen nodig, afhankelijk van hun operationele modi, besturing, gebruikte gereedschappen en uit te voeren werkzaamheden. Een industriële robotmotor moet het potentieel hebben om een breed scala aan taken uit te voeren dan de normale motoren om zich te specialiseren in een bepaalde taak.
Industriële robots zijn apparaten die tot op zekere hoogte menselijke bewegingen dupliceren en tegelijkertijd het gevaar verminderen, waardoor ze meer kracht, nauwkeurigheid en continuïteit bieden. Ze hebben een breed scala aan motorisch aangedreven bewegingen nodig, afhankelijk van hun operationele modi, besturing, gebruikte gereedschappen en uit te voeren werkzaamheden. Een industriële robotmotor moet het potentieel hebben om een breed scala aan taken uit te voeren dan de normale motoren om zich te specialiseren in een bepaalde taak.
Elektromotoren worden het meest gebruikt in industriële robotica vanwege de zeer efficiënte stroomvoorziening en het relatief eenvoudige ontwerp, waardoor ze in alle opzichten populairder zijn in termen van kosten-prestatieverhouding - installatie, onderhoud en service.
Afhankelijk van het benodigde werk worden verschillende motoren voor verschillende doeleinden gebruikt. DC-motoren worden bijvoorbeeld gebruikt voor bewegingen met de klok mee en tegen de klok in, voorbeelden zijn in kranen en takels, pulsmotoren worden gebruikt om pulserende bewegingen te bieden met behulp van DC-pulsbreedte, motoren voor gedeeltelijke draaiing worden gebruikt om hoofd- en armachtige bewegingen te bieden en de meest complexe - stappenmotoren worden gebruikt om getrapte bochten in stappen van graden te maken.
Bovendien worden, afhankelijk van het soort werk, motoren met verschillende waarden en afmetingen voor verschillende doeleinden gebruikt. Er zijn verschillende soorten motoren met elk verschillende toepassingen op verschillende plaatsen, afhankelijk van het werk en het robotontwerp.
Mohan Krishna. L.
Verkoop- en ondersteuningsmanager
Robots worden gebruikt om het werk te doen dat door mensen kan worden gedaan en er zijn veel redenen waarom robots beter zijn dan mensen. 
Er zijn twee hoofdtypen robots: -
Mobiele robot: Die bewegen op poten of sporen.
Stationaire robot: Dat heeft een vaste basis.
Stationaire robots, meestal Robotarmen, kunnen worden gebruikt voor het oppakken van objecten of voor een ander werk waarbij u naar een object reikt.
Een robotarm heeft drie basisonderdelen: -
- Schoudergewricht
- Polsgewricht
- Vaste basis
Een robot nodig voor de
- Mogelijkheid om snel en gevaarlijk te werken.
- Mogelijkheid om taken keer op keer te herhalen.
- Vermogen om nauwkeurig te werken.
- Mogelijkheid om verschillende taken uit te voeren.
- Efficiëntie.
Motor is een apparaat dat elektrische energie omzet in mechanische energie, d.w.z. een elektromechanisch apparaat.Er zijn twee soorten motoren, zoals AC-motor en DC-motor
De motor die in industriële robotica wordt gebruikt, is een servomotor. Servomotor is een eenvoudige elektrische motor die wordt bestuurd met behulp van een servomechanisme.Als de geregelde motor wordt bediend door AC, wordt dit AC-servomotor genoemd, anders DC-servomotor. De meeste servomotoren kunnen ongeveer 90 tot 180 graden draaien. een volledige 360 graden of meer. Enkele van de toepassingen van servomotor in robotica is
- Servomotortoepassing in robotica, d.w.z. een eenvoudige pick-and-place-robot, deze wordt gebruikt om een object uit de ene positie te kiezen en het object op een andere positie te plaatsen.
- Servomotor in transportbanden wordt gebruikt
- in industriële productie- en assemblage-eenheden om een object van het ene assemblagestation naar het andere te brengen. Bijvoorbeeld: - Een proces voor het vullen van flessen.
- Servomotor in robotvoertuig hier de servomotor die in de wielen wordt gebruikt. Omdat de servomotor met continue rotatie wordt gebruikt.
Dinesh.P
Marketing Executive
 Er worden robots geïntroduceerd om het menselijke harde werk te verminderen en om geluk te creëren voor mensen voor toekomstige ontwikkelingen. De term robots betekent de machine die de verschillende menselijke kenmerken nabootst. Robotica omvat de kennis van mechanica, elektronica, elektrotechniek en informatica. Motoren die in robots worden gebruikt, zijn DC-motoren, stappenmotoren en servomotoren
Er worden robots geïntroduceerd om het menselijke harde werk te verminderen en om geluk te creëren voor mensen voor toekomstige ontwikkelingen. De term robots betekent de machine die de verschillende menselijke kenmerken nabootst. Robotica omvat de kennis van mechanica, elektronica, elektrotechniek en informatica. Motoren die in robots worden gebruikt, zijn DC-motoren, stappenmotoren en servomotoren
Waar,
- DC-motoren worden gebruikt voor continue rotatie
- Stappenmotoren worden gebruikt om een paar graden te draaien
- Servomotoren worden gebruikt voor positionering, het kan worden gebruikt in auto's en vliegtuigen
Ganesh .J
Marketing Executive 
Robots worden gebruikt om het werk te doen dat door mensen kan worden gedaan en verminderen ook de menselijke inspanning en tijd en verbeteren de kwaliteit. Motoren die worden gebruikt in industriële robotica zijn
- Wisselstroom (AC) motoren
- Gelijkstroom (DC) motoren
- Servomotoren
- Stappenmotoren.