
CAN of Controller Area Network is een twee-draads half-duplex high-speed seriële netwerktechnologie. Het wordt voornamelijk gebruikt bij communicatie tussen verschillende apparaten in een gebied met een kleine straal, zoals in een auto. Een CAN-protocol is een CSMA-CD / ASM-protocol of carrier sense multiple access collision detection arbitrations on message priority protocol. CSMA zorgt ervoor dat elk knooppunt een bepaalde periode moet wachten voordat een bericht wordt verzonden. Botsingsdetectie zorgt ervoor dat de botsing wordt voorkomen door de berichten te selecteren op basis van hun voorgeschreven prioriteit.
Het biedt een signaalsnelheid van 125 kbps tot 1 Mbps. Het voorziet in 2048 verschillende bericht-ID's.
Het is ISO-11898-standaard en maakt gebruik van het 7-laags Open Systems Interconnection-model.
Geschiedenis:
Het werd ontwikkeld door Robert Bosch in 1982 en officieel uitgebracht door de Society of Automotive Engineers in Detroit in 1986. De eerste auto met geïntegreerde CAN-bus werd in 1992 geproduceerd door Mercedes Benz.
ISO 11898-architectuur:

Afbeeldingsbron - theremino
De gelaagde architectuur bestaat uit drie lagen
- Applicatielaag : Het werkt samen met het besturingssysteem of de toepassing van het CAN-apparaat.
- Datalinklaag : Het verbindt de feitelijke gegevens met het protocol voor wat betreft het verzenden, ontvangen en valideren van gegevens.
- Fysieke laag : Het vertegenwoordigt de daadwerkelijke hardware.
Het standaard CAN-frame bestaat uit de volgende bits:
 Het standaard CAN-frame bestaat uit de volgende bits:
Het standaard CAN-frame bestaat uit de volgende bits:
- SOF- Start van Fr ame. Het bericht begint vanaf dit punt.
- Identificeren : Het bepaalt de prioriteit van het bericht. Verlaag de binaire waarde, hoger is de prioriteit. Het is 11 bit.
- RTR - Verzoek om verzending op afstand. Het is dominant wanneer informatie van een ander knooppunt vereist is. Elk knooppunt ontvangt het verzoek, maar alleen dat knooppunt waarvan de identificatie overeenkomt met die van het bericht, is het vereiste knooppunt. Elk knooppunt ontvangt ook het antwoord. Z
- HIER - Enkele identificatie-extensie. Als het dominant is, betekent dit dat een standaard CAN-ID zonder extensie wordt verzonden.
- R0 - gereserveerd bit.
- DLC - Code datalengte. Het bepaalt de lengte van de gegevens die worden verzonden. Het is 4 bit
- Gegevens - Er kunnen maximaal 64 bit aan gegevens worden verzonden.
- CRC - Cyclische redundantiecontrole. Het bevat de checksum (aantal verzonden bits) van de voorgaande toepassingsgegevens voor foutdetectie.
- HELAAS - Erken. Het is voor 2 bit. Het is dominant als een correct bericht wordt ontvangen.
- EOF - einde van het frame. Het markeert het einde van het blikframe en schakelt bitvulling uit.
- IFS - Inter Frame-ruimte. Het bevat de tijd die de controller nodig heeft om een correct ontvangen frame naar de juiste positie te verplaatsen.
5 verschillende berichttypen zijn:
- Dataframe : Het bestaat uit een willekeurig veld, dataveld, CRC-veld en de bevestigingsvelden.
- Afgelegen frame : Het vraagt om overdracht van gegevens vanaf een ander knooppunt. Hier is het RTR-bit recessief.
- Foutkader : Het wordt verzonden wanneer er een fout wordt gedetecteerd.
- Overbelast frame : Het wordt gebruikt om een vertraging tussen berichten te bieden. Het wordt verzonden wanneer de knooppunten te druk worden.
- Geldig frame : Een bericht is geldig als het EOF-veld recessief is. Anders wordt het bericht opnieuw verzonden.
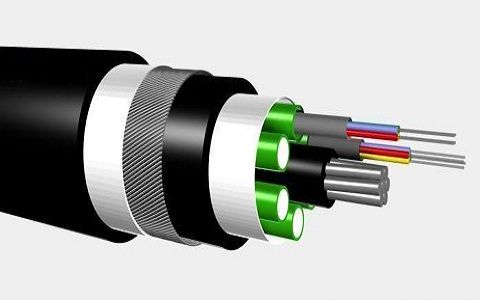
CAN fysieke laag:
CAN-bus

Afbeeldingsbron - digital.ni
Het bestaat uit een tweedraads seriële verbinding - CAN_H en CAN_L en hun spanningsniveaus ten opzichte van elkaar bepalen of een 1 of 0 wordt verzonden. Dit is differentiële signalering. De stroom die in elke signaallijn stroomt is gelijk maar tegengesteld in richting, wat resulteert in een veldonderdrukkingseffect dat een sleutel is tot lage ruisemissies. Dit zorgt voor een gebalanceerde differentiële signalering die ruiskoppeling vermindert en een hoge transmissiesnelheid over de draden mogelijk maakt. Meestal zijn de aders twisted pair-kabels met een buslengte van 40 m en maximaal 30 knooppunten. Het is een afgeschermde of niet-afgeschermde kabel met een karakteristieke impedantie van 120 Ohm.
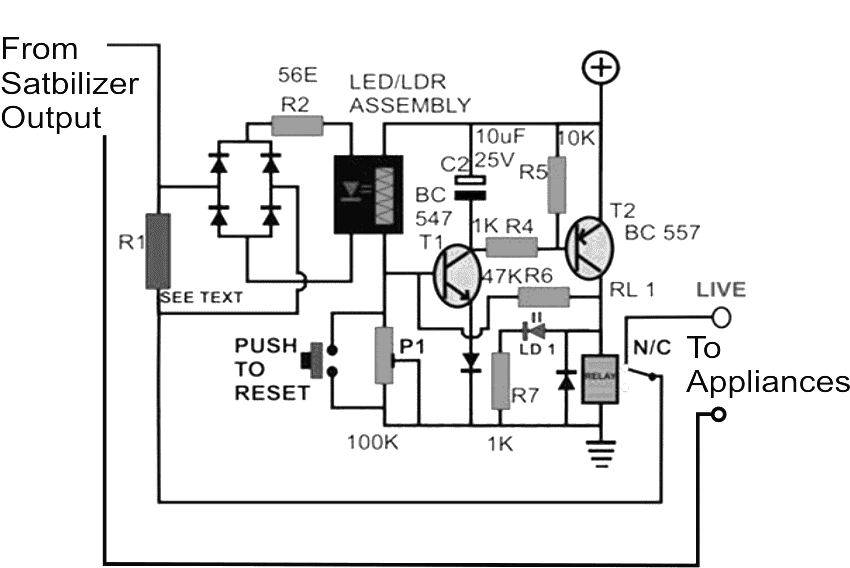
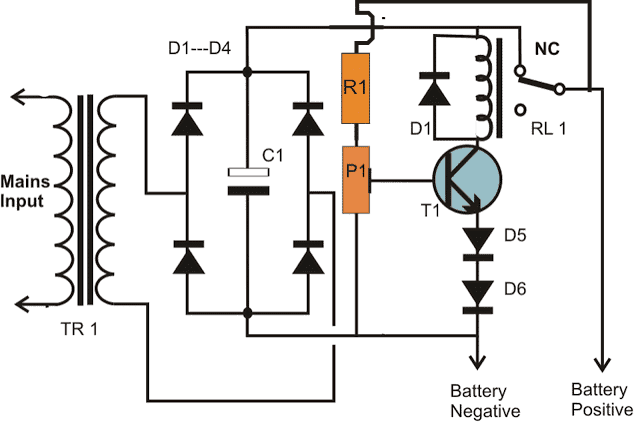
KAN ZENDONTVANGER:

CAN voor voertuigen van Hugo Provencher. De twee draden CANH en CANL worden normaal gesproken op 2,5 V bepaald door de twee transistors en de spanningsbron van 2,5 V. In principe moet het verschil tussen de twee draden altijd 0 zijn. De besturing van de driver bepaalt de spanning die wordt toegepast op de CANH- en CANL-draden. Wanneer beide transistors geleidend zijn, daalt de spanning over de 1sttransistor en de diode is 1.5V, waardoor de CANH-draad tot 3.5V trekt. De spanningsval over de 2ndtransistor en de diode is 1V, waardoor de CANL-draad naar beneden trekt naar 1,5V. De diodes worden gebruikt voor hoogspanningsbeveiliging. De ontvanger is een discriminatorcircuit dat een output geeft van 1 als de twee inputs CANH en CANL hetzelfde zijn en een output van 0 als de twee inputs verschillend zijn. Het dominante TXD-blok wordt gebruikt voor aardfoutbeveiliging en het thermische uitschakelingsblok schakelt de besturing van de driver uit als de diodes en transistors oververhit raken.
Voordelen van CAN:
- Het vermindert de bedrading omdat het een gedistribueerde besturing is en dit zorgt voor een betere systeemprestatie.
- Veel fabrikanten van CAN-chips leverden de datalinklaag en de fysieke laag die op de chip zijn aangesloten en de softwareontwikkelaar hoeft alleen maar de applicatiecodering te ontwikkelen.
- Het biedt de mogelijkheid om in verschillende elektrische omgevingen te werken en zorgt voor een ruisvrije overdracht.
- Verkeersopstoppingen worden geëlimineerd omdat de berichten worden verzonden op basis van hun prioriteit en het hele netwerk kan voldoen aan de timingbeperkingen.
- Het zorgt voor een foutloze verzending, aangezien elk knooppunt tijdens de verzending van het bericht op fouten kan controleren en het foutenframe kan verzenden.
CAN werkvoorbeeld:
Het Controller Area Network heeft enorme toepassingen in zowel industriële als voertuigen. Een van de belangrijkste toepassingen is de communicatie tussen de verschillende apparaten in een voertuig. Een andere kan een van de verschillende microcontrollers zijn, stel voor het detecteren van een wachtwoord, gebruikt om te voldoen aan alle vereisten, zoals het openen van een gesloten deur met een wachtwoord of het inschakelen van een lamp, enz.

Controller area netwerkcircuit
De basistoepassing bestaat uit 3 microcontrollers die met elkaar communiceren via twee draden zoals in een CAN-netwerk. De 1stmicrocontroller is gekoppeld aan een toetsenbord, de 2ndmet een LCD, en de derde met een zoemer en een relais dat een lamp bedient. Wanneer een wachtwoord wordt ingevoerd in het toetsenbord, wordt de 2ndmicrocontroller fungeert als een ontvanger en ontvangt het verzonden bericht bit voor bit van de 1stzender en geeft het bericht weer op het LCD-scherm. Als het hele bericht is verzonden, wordt de 2ndmicrocontroller voert de verificatie uit en als het wachtwoord verkeerd is, stuurt het een signaal naar de 3rdmicrocontroller, die op zijn beurt de zoemer verzendt, wordt ingeschakeld met dit signaal. Als het wachtwoord juist is, wordt de 3rdmicrocontroller schakelt het relais in dat op zijn beurt de lamp inschakelt.






{kind=link}
{kind=link}